




Influence of Geometry of Space Debris on Laser Ablation Impulse
-
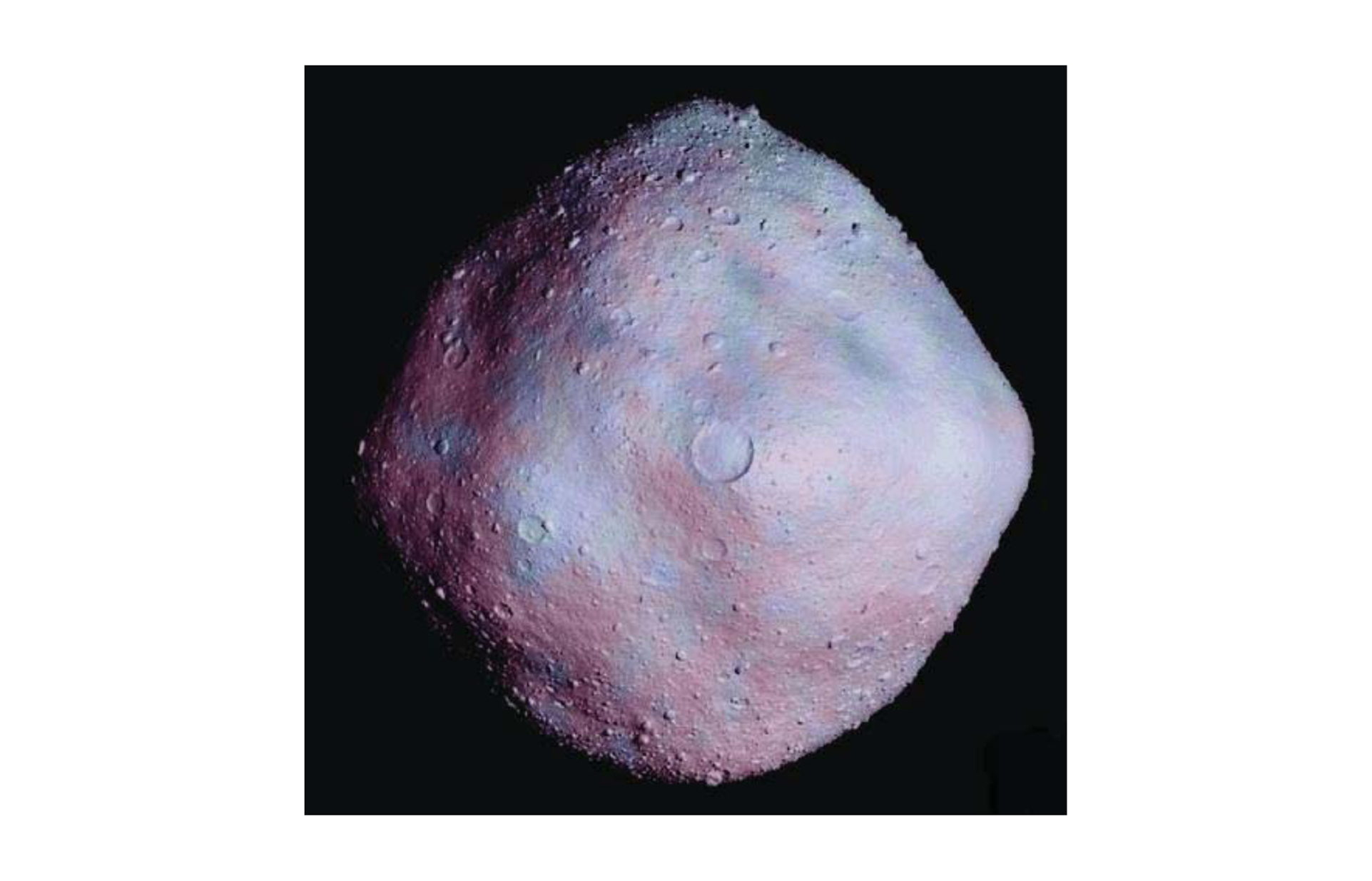
摘要: 激光烧蚀驱动是移除厘米级空间碎片非常有前景的技术,但空间碎片不规则的几何形状对激光烧蚀产生的驱动效果有十分复杂的影响,是目前研究的难点和热点之一。从激光烧蚀驱动目标冲量耦合规律出发,基于通过目标表面顶点的三角化三维重构,提出了一种可以精确计算激光辐照外形不规则目标所产生冲量大小及方向的方法。以立方体、球体和圆柱体3个典型的几何外形规则的目标为对象,验证了该方法的计算精度。利用该方法研究了激光辐照几何外形规则目标和不规则类球体小行星"贝努"产生的冲量规律,给出了在特定激光入射角度下不同几何外形目标产生最大冲量的条件。这一方法和结果对激光烧蚀驱动移除空间碎片技术研究有重要参考作用。Abstract: Laser ablation driven is a very promising technology to remove centimeter-scale space debris, however, the irregular geometry of the space debris has very complicated influence on the impulse of the laser ablation, which is a difficulty and hot issue in current related research.In this study, based on the impulse coupling law of laser ablation, we presented a method for accurately calculating the impulse magnitude and direction for the irregular target irradiated by laser based on the surface triangulation and three-dimensional reconstruction of irregular objects.The accuracy of this method is verified by 3 targets with typical geometric shapes:cube, sphere and cylinder.Using this method, we studied the impulse generation rule of laser irradiating the regular targets with typical geometrical shapes and the irregular spherical target asteroid "Bennu", and obtained the conditions of the maximum impulse for various geometrically shaped targets under specific laser incidence angle.This method and the results are very useful for the research of active debris removal by laser.
-
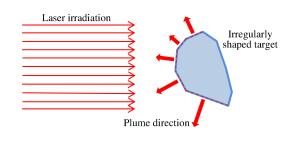
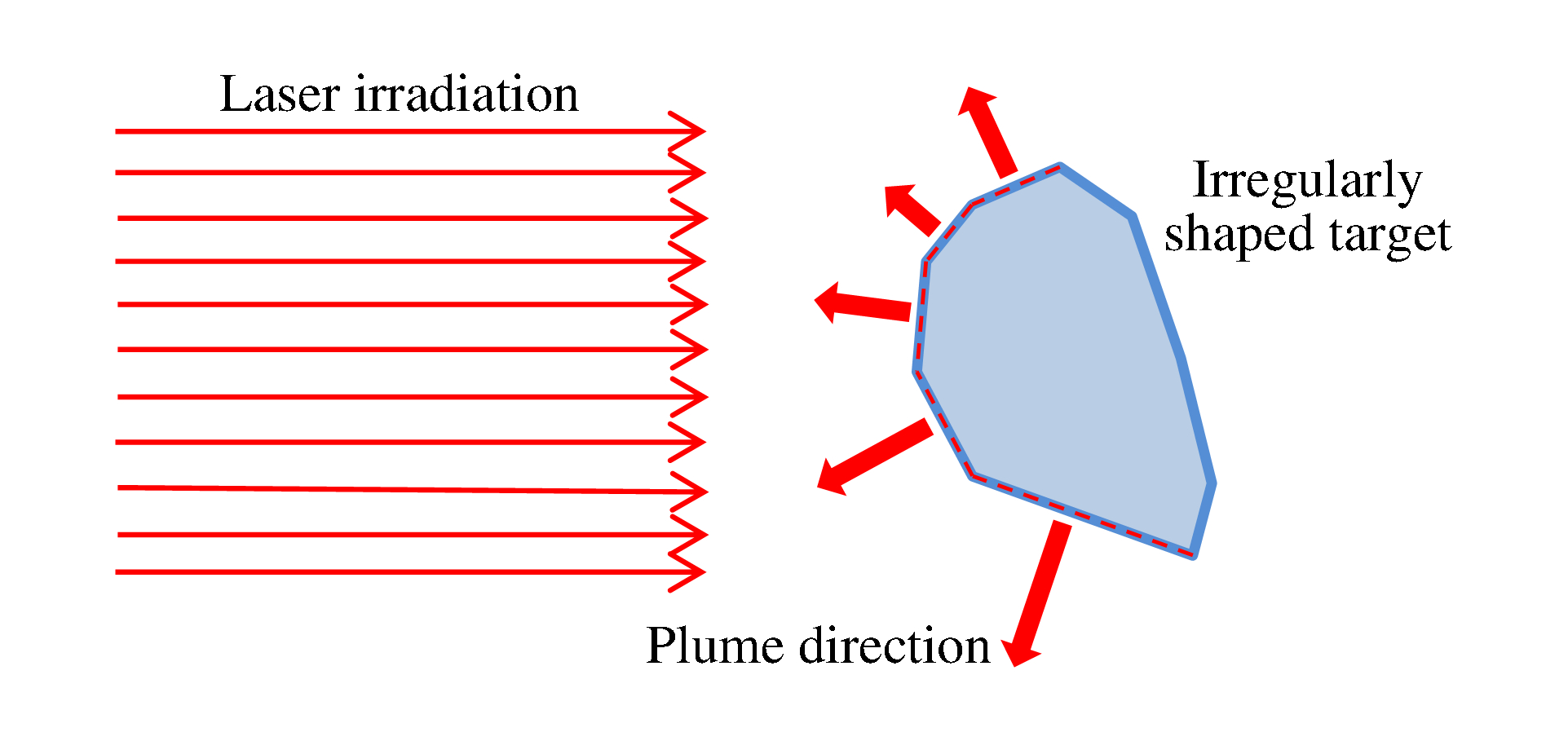
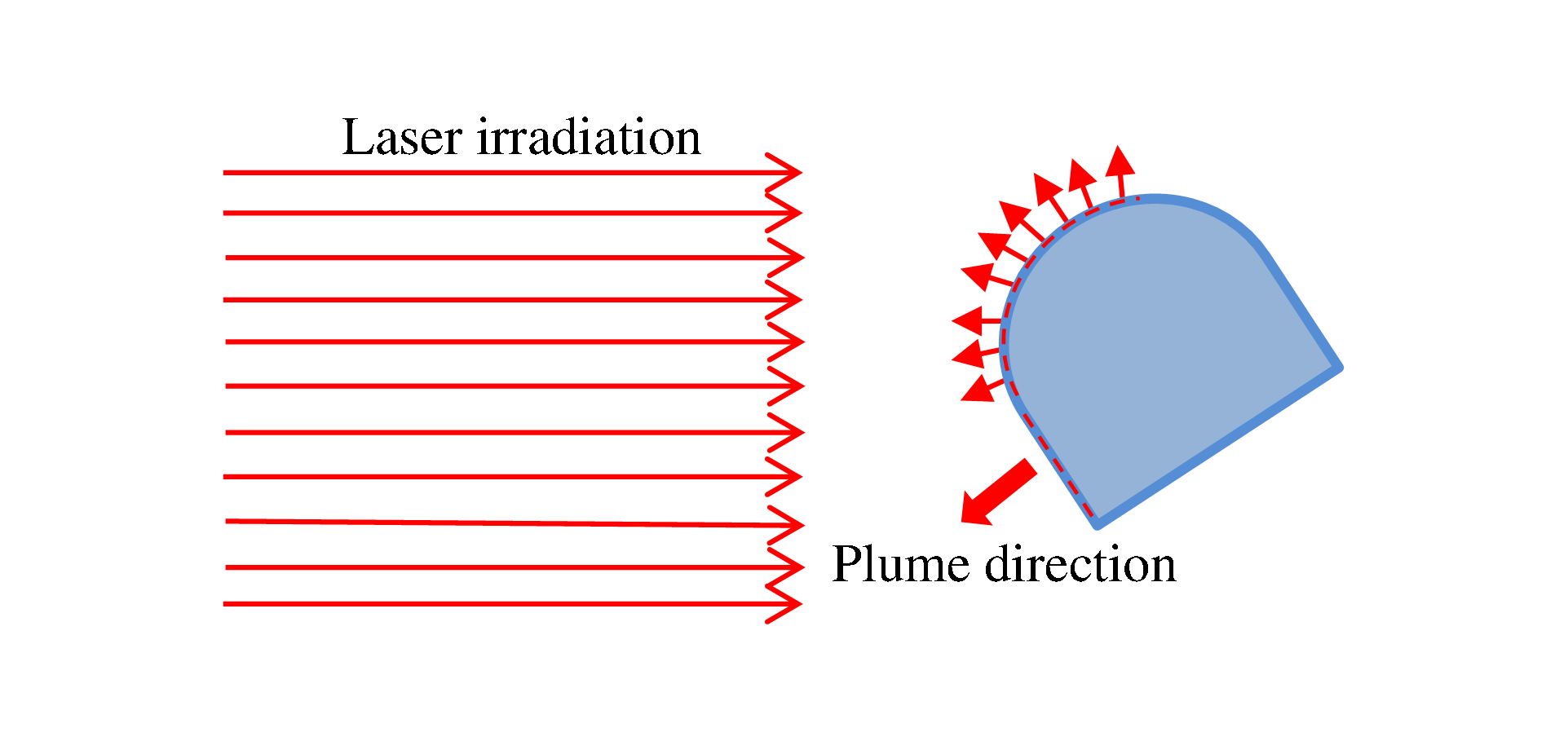
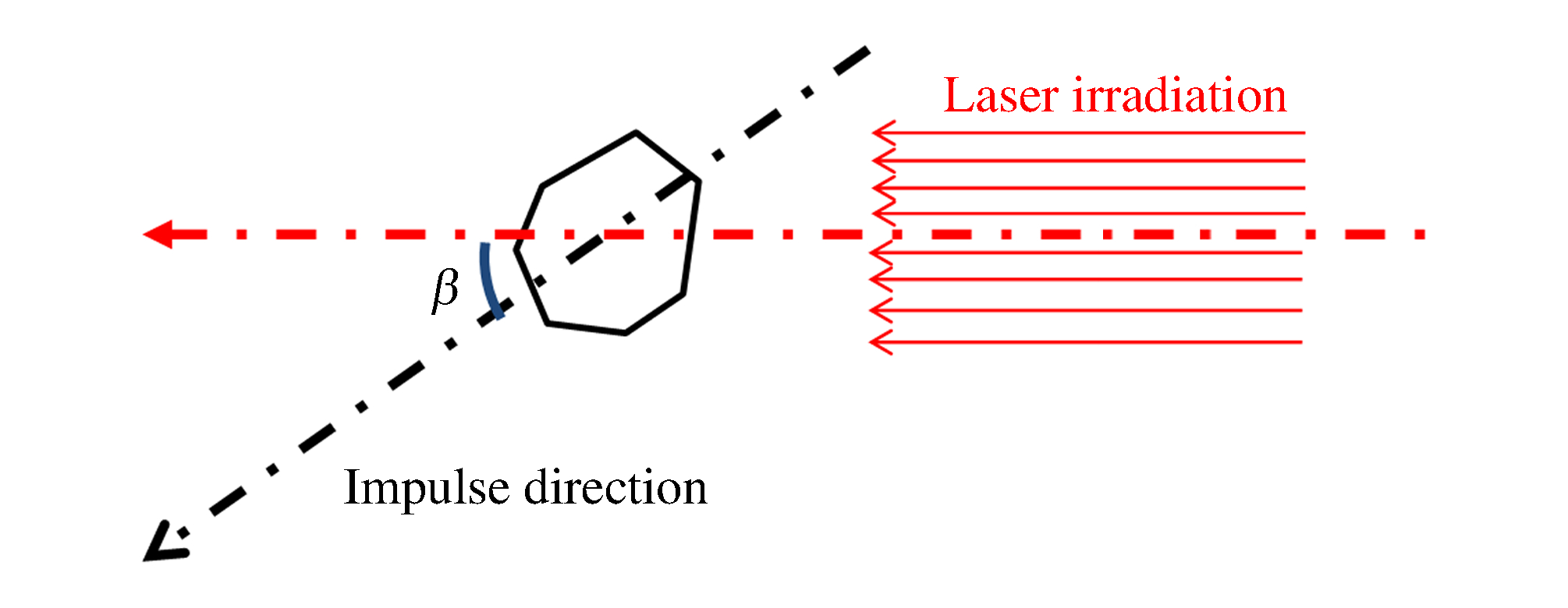
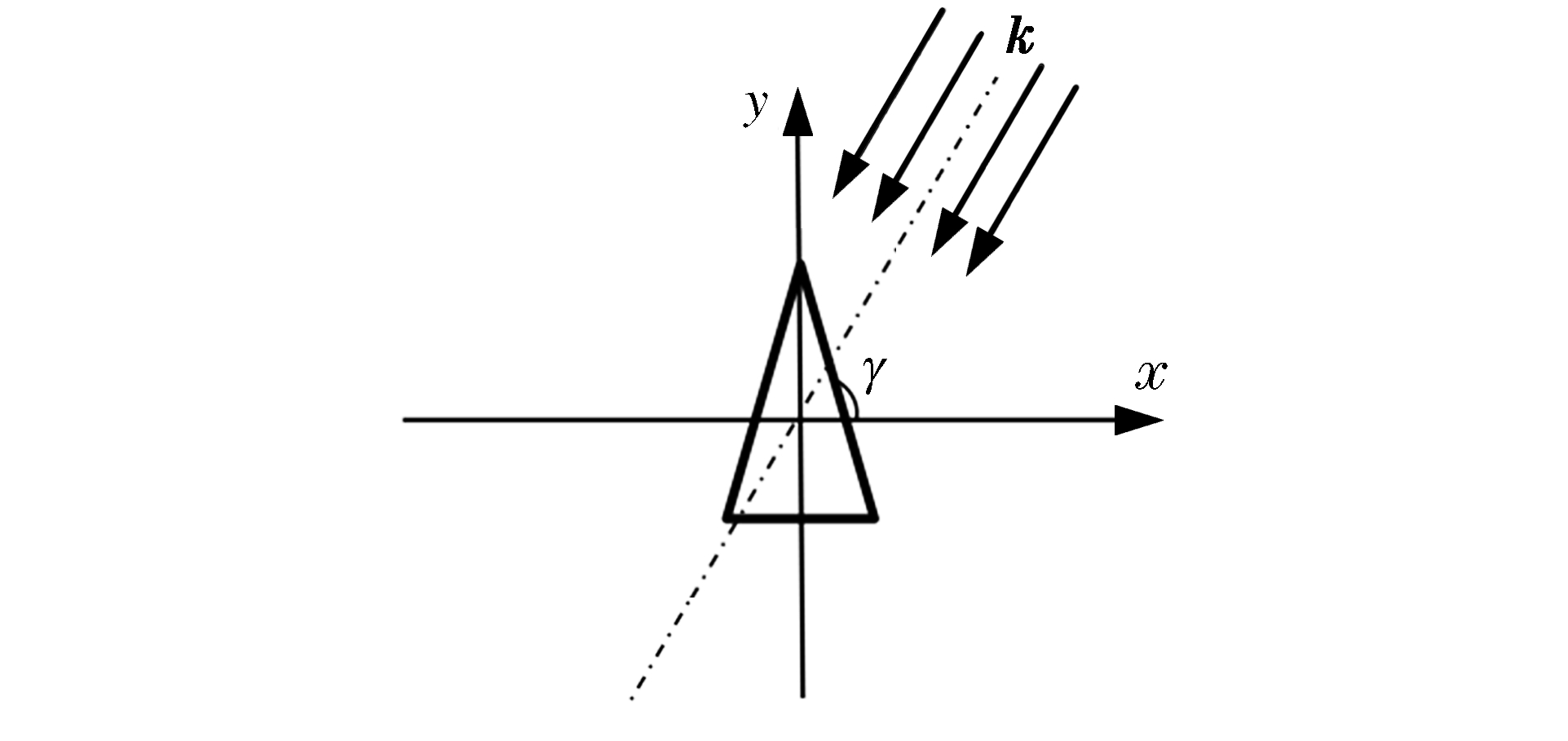
图 2 激光照射外形不规则目标
Figure 2. Schematic of irregularly shaped target under laser irradiation
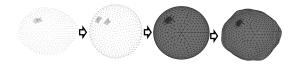
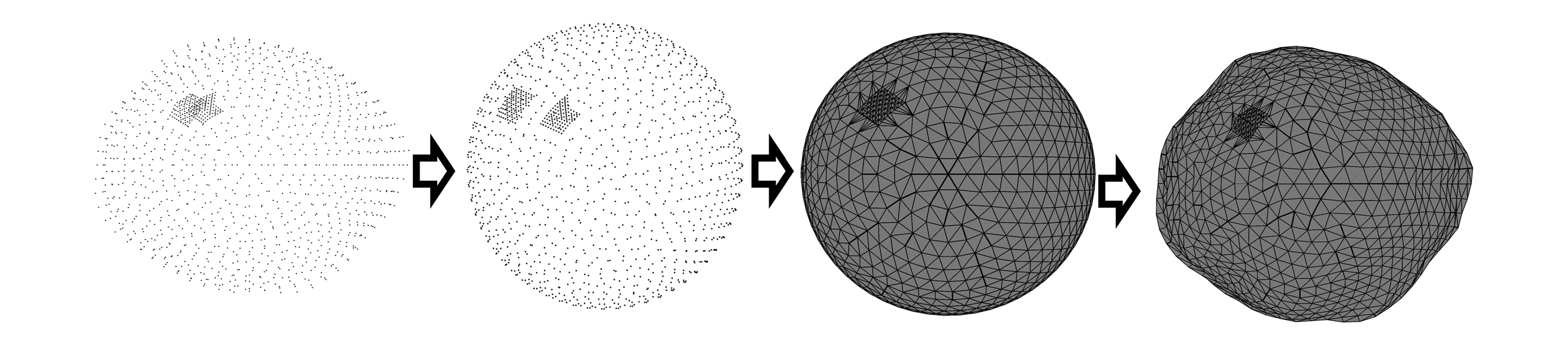
图 4 三角化三维重构过程
Figure 4. Schematic of three-dimensional triangulation reconstruction process

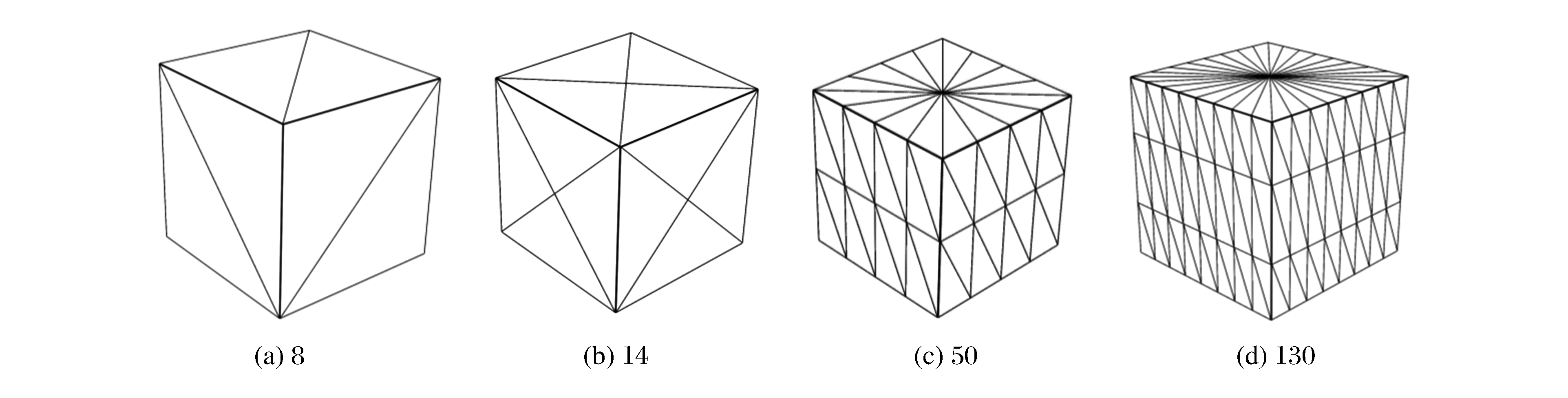
图 6 不同顶点数量下立方体三角化重构
Figure 6. Triangulation reconstruction of cube with different vertex numbers

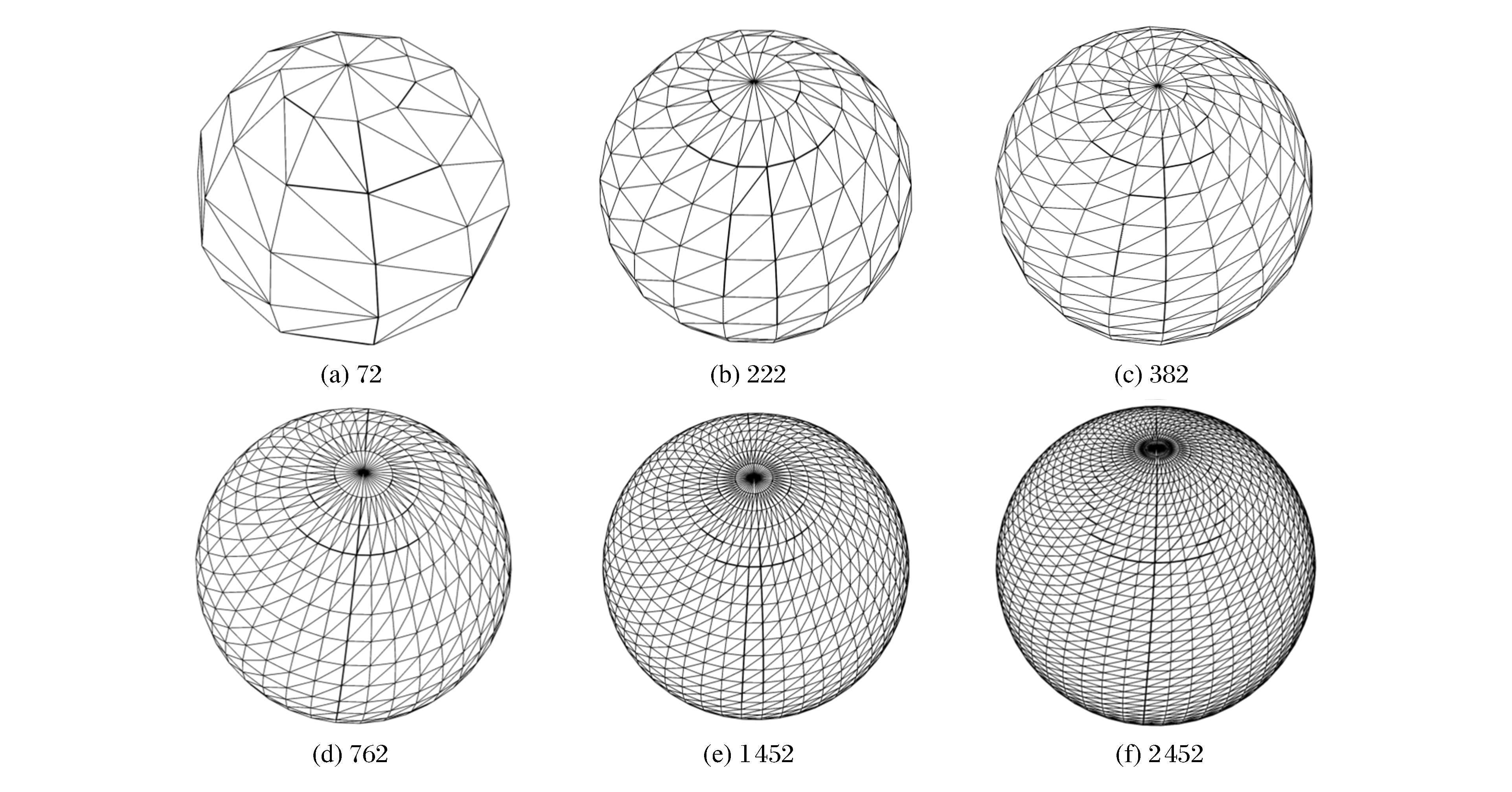
图 7 不同顶点数量下球体三角化
Figure 7. Triangulation reconstruction of sphere with different vertex numbers
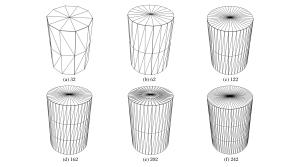
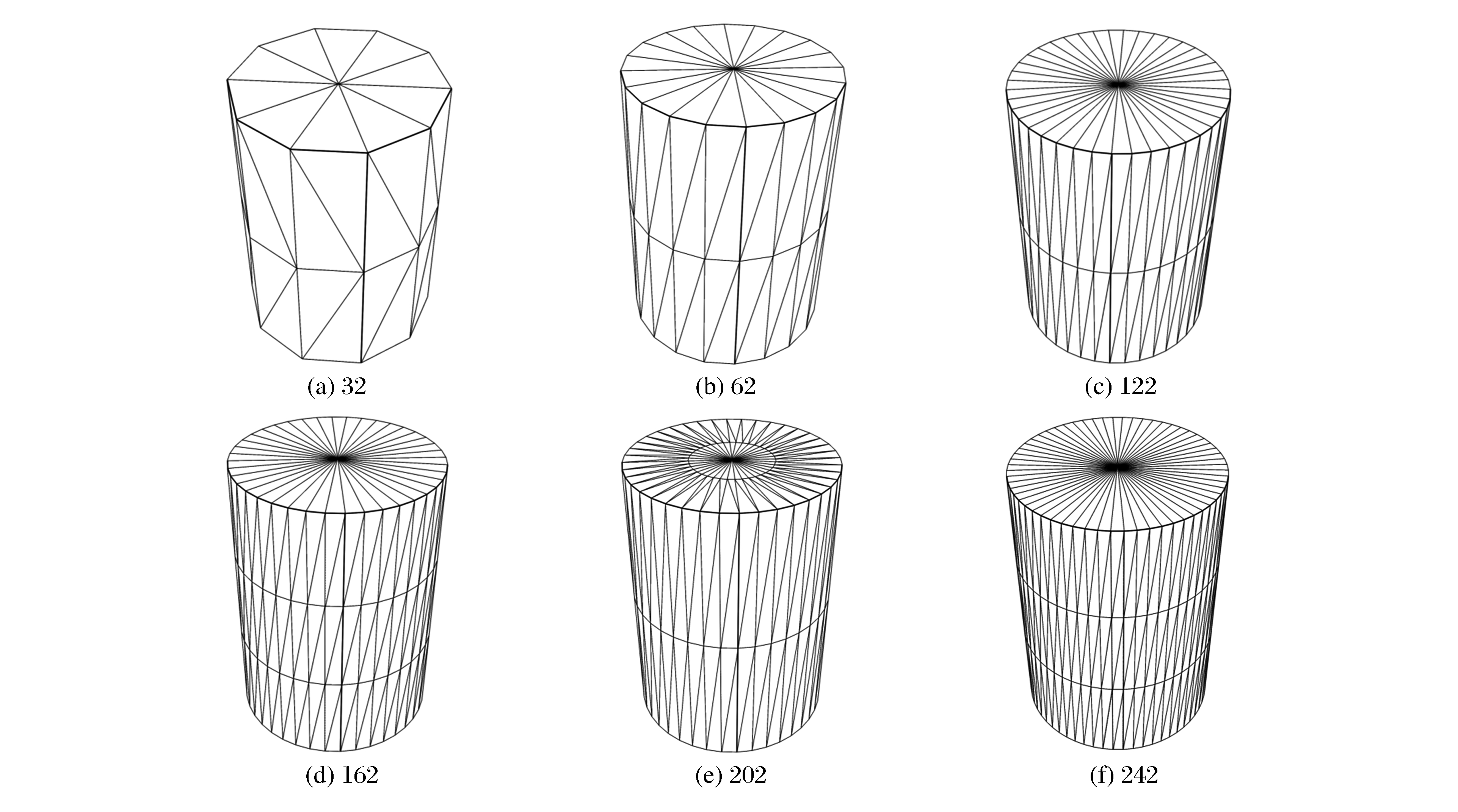
图 8 不同顶点数量下圆柱体三角化
Figure 8. Triangulation reconstruction of cylinder with different vertex numbers
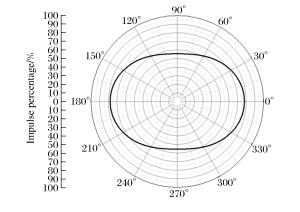
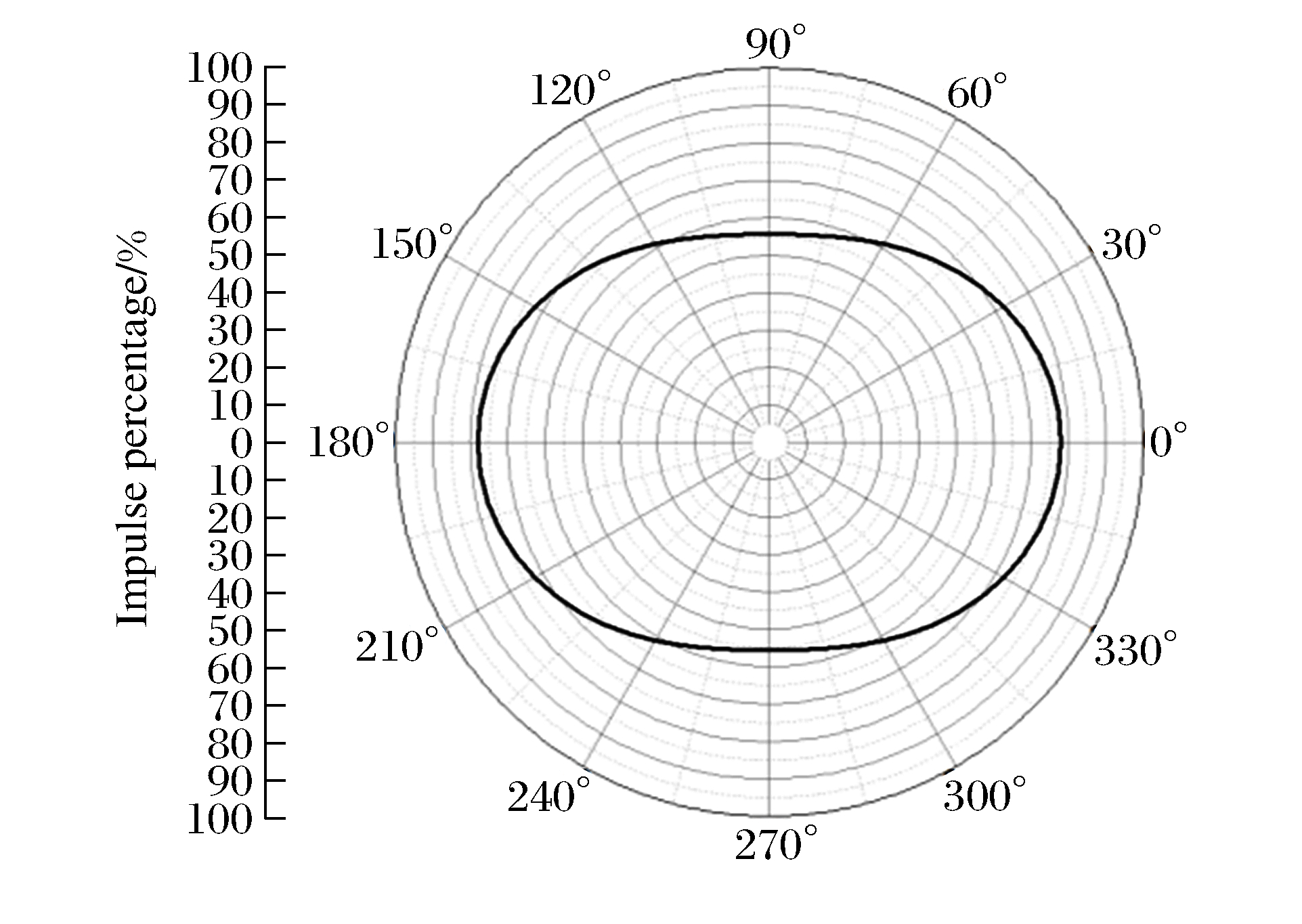
图 11 圆柱体在不同角度激光照射下产生的冲量占平面目标冲量的比例
Figure 11. Impulse percentage of cylinder to planner target irradiated by laser at different angles
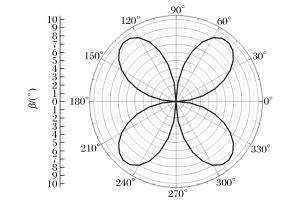
图 12 圆柱体在不同角度激光照射下产生的冲量偏角
Figure 12. Impulse angle of cylinder irradiated by laser at different angles

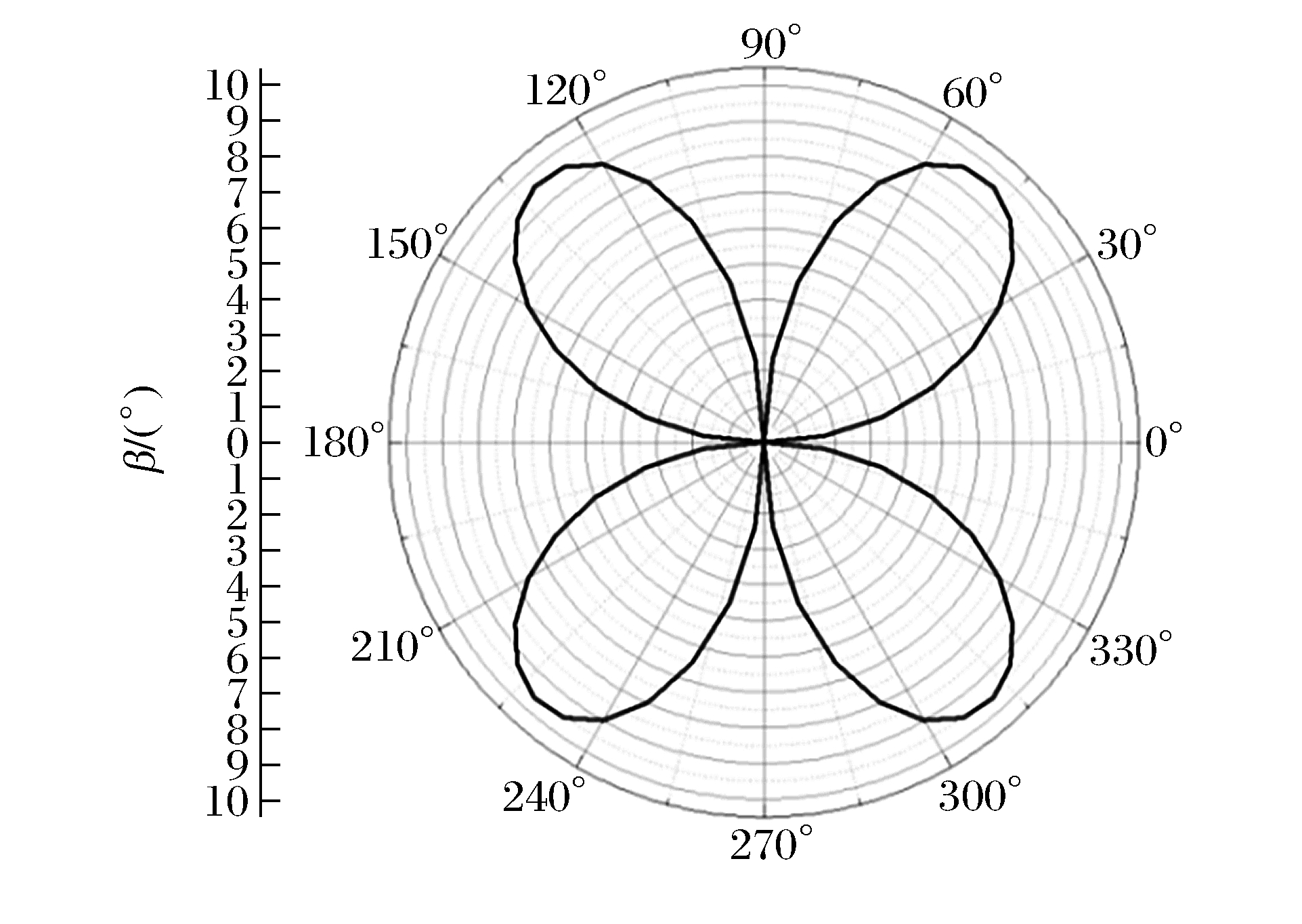
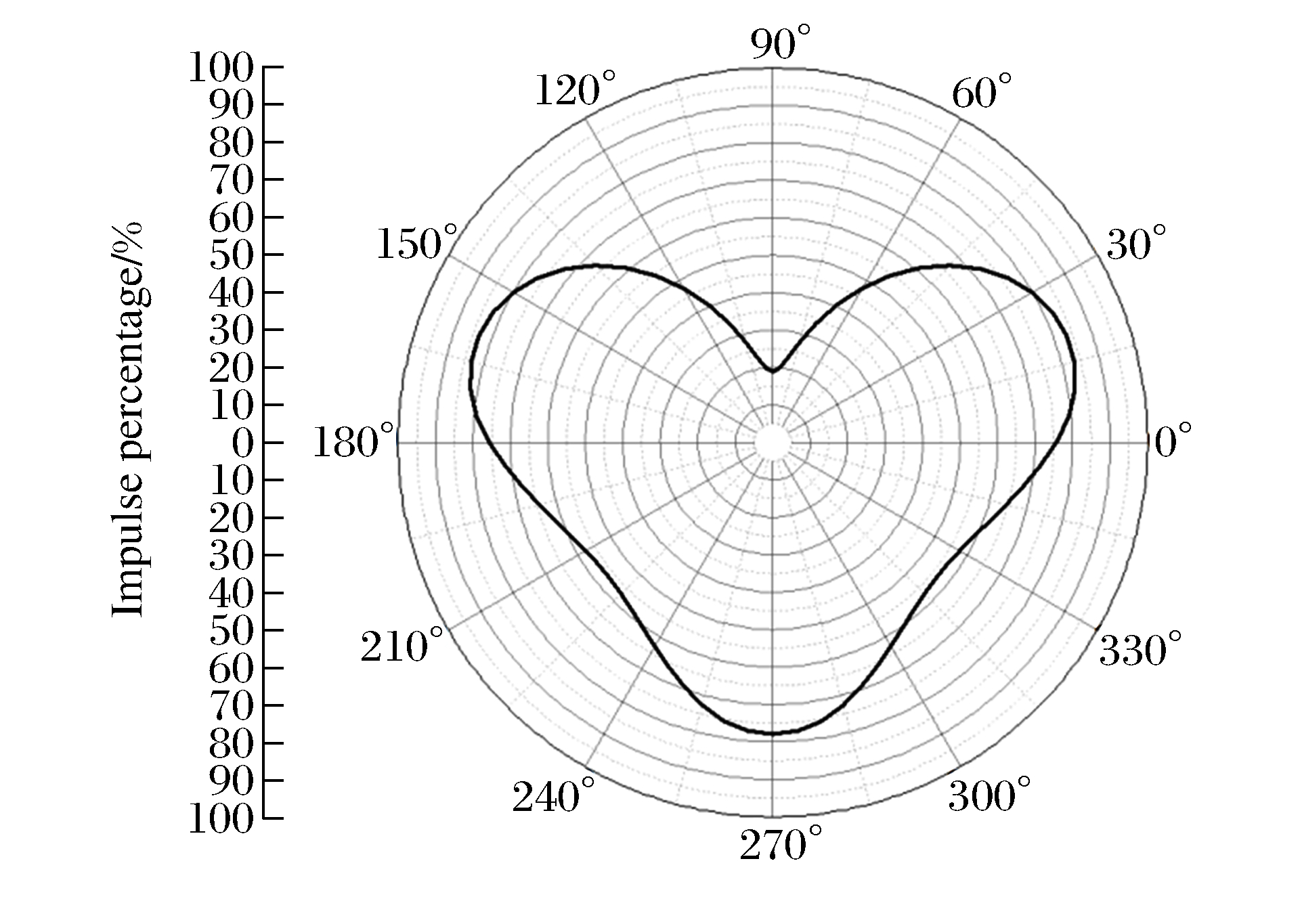
图 14 圆锥体在不同角度激光照射下产生的冲量占平面目标冲量的比例
Figure 14. Impulse percentage of cone to planner target irradiated by laser at different angles

图 15 圆锥体在不同角度激光照射下产生的冲量偏角
Figure 15. Impulse angle of cone irradiated by laser at different angles
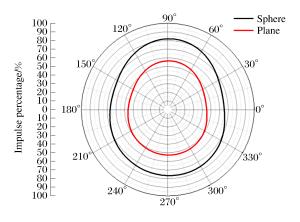
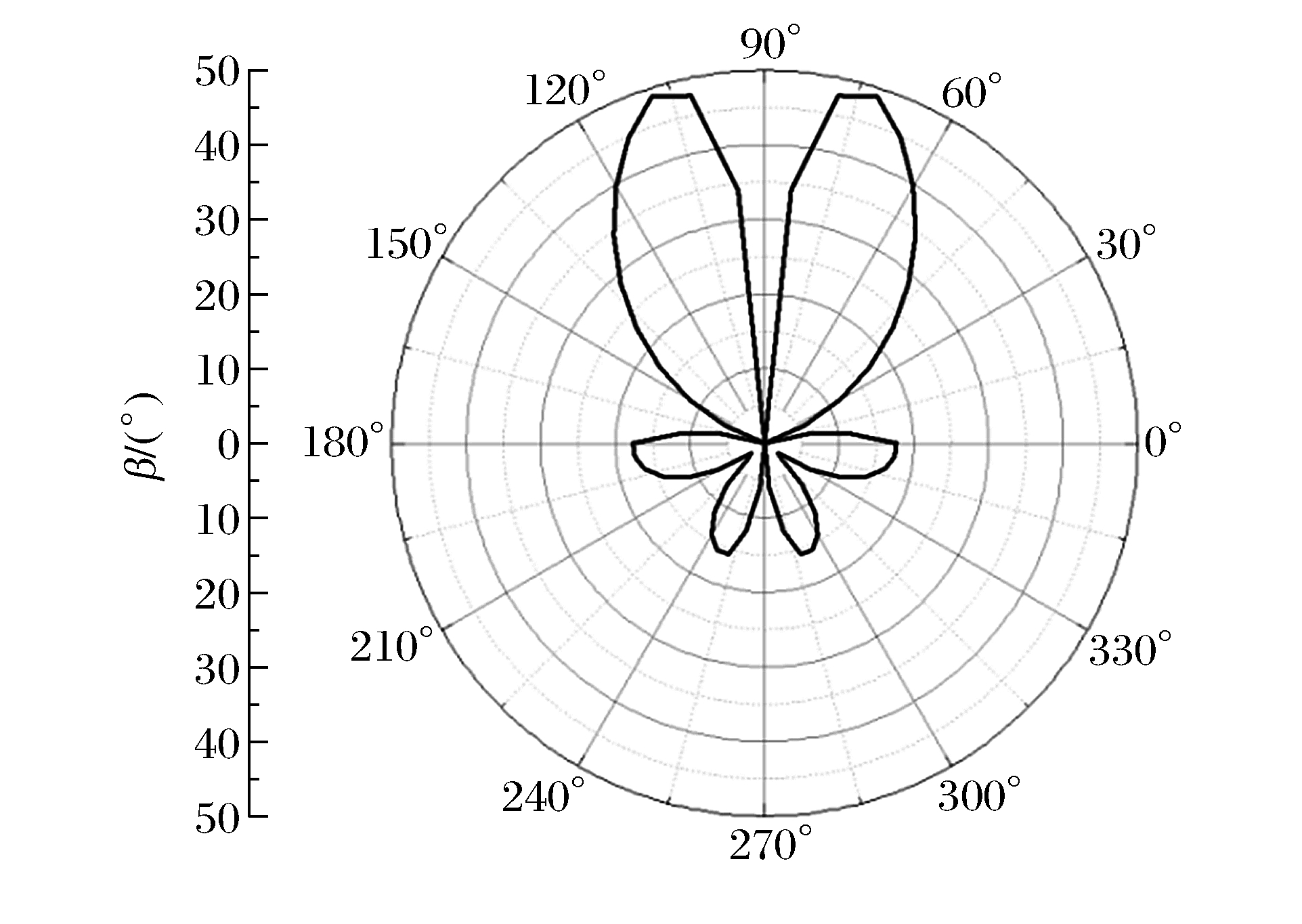
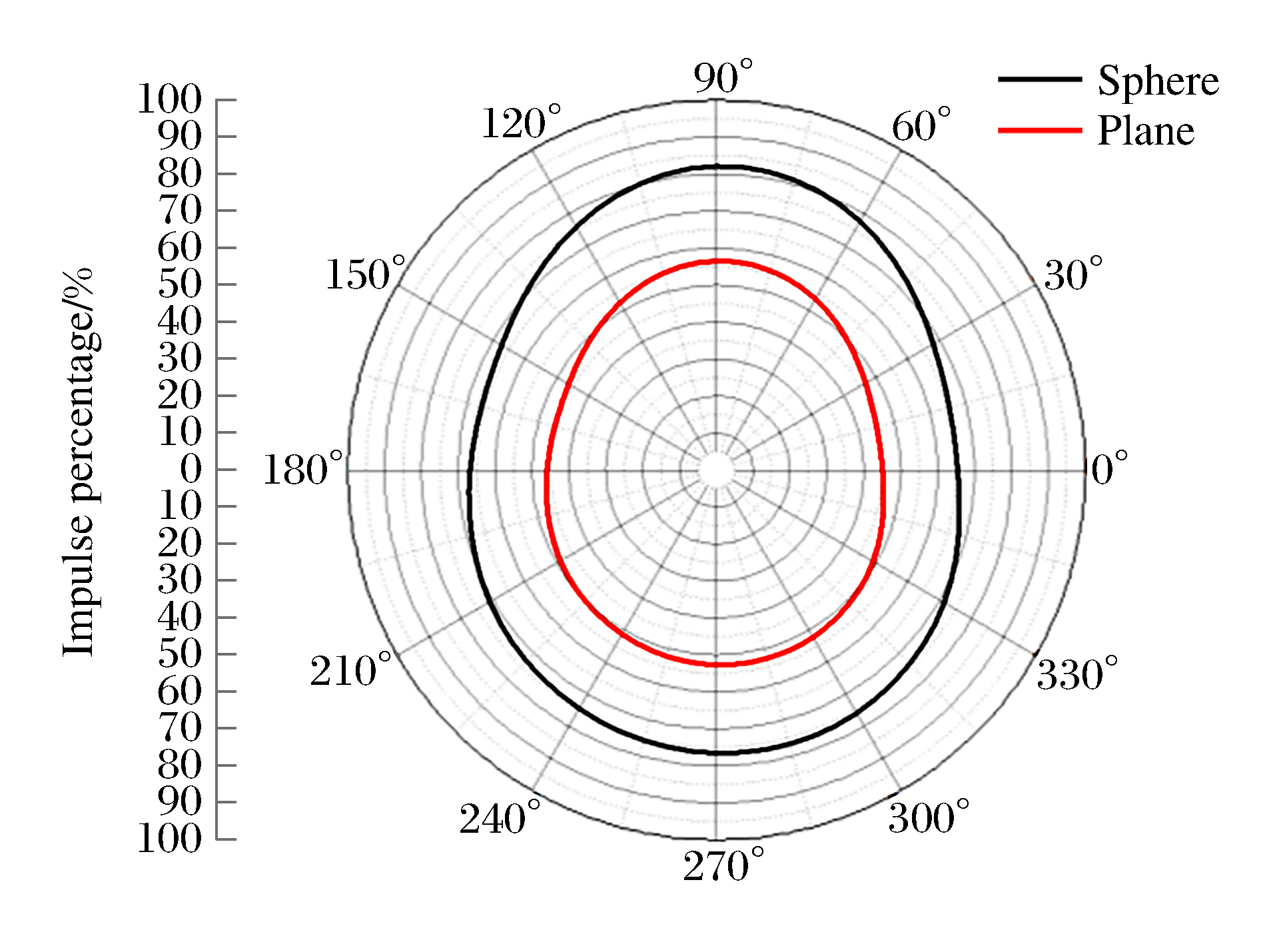
图 18 贝努在不同角度激光照射下产生的冲量占平面/球体目标的比例
Figure 18. Impulse percentage of Bennu to plane/sphere target irradiated by laser at different angles
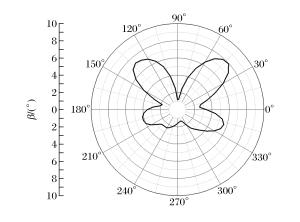
图 19 贝努在不同角度激光照射下产生的冲量偏角
Figure 19. Impulse angle of Bennu irradiated by laser at different angles
表 1 不同顶点数量下立方体三角化计算结果
Table 1. results of cube with different vertex numbers
Vertex
numberMass/
gMoment of inertia/
(10-4g·m2)Impulse/
(mN·s)Velocity/
(mm·s-1)Angular velocity/
(rad·s-1)Jx Jy Jz Px Py Pz Δvx Δvy Δvz ωx ωy ωz 8 2.7 1.31 1.31 1.31 1.96 1.96 1.96 -2.493 -2.493 -2.493 0 0 0 14 2.7 1.31 1.31 1.31 1.96 1.96 1.96 -2.493 -2.493 -2.493 0 0 0 50 2.7 1.31 1.31 1.31 1.96 1.96 1.96 -2.493 -2.493 -2.493 0 0 0 130 2.7 1.31 1.31 1.31 1.96 1.96 1.96 -2.493 -2.493 -2.493 0 0 0 Formula 2.7 1.31 1.31 1.31 1.96 1.96 1.96 -2.493 -2.493 -2.493 0 0 0  下载: 导出CSV
下载: 导出CSV
表 2 不同顶点数量下球体三角化计算结果
Table 2. Calculation results of sphere with different vertex numbers
Vertex
numberMass/
gMoment of inertia/
(g·m2)Impulse/
(mN·s)Velocity/
(mm·s-1)Angular velocity/
(10-7rad·s-1)Jx Jy Jz Px Py Pz Δvx Δvy Δvz ωx ωy ωz 72 158.926 603 1 0.109 0.109 0.105 2.693 2.691 2.534 5.820 5.820 5.477 2 220 121 10 200 222 170.834 427 5 0.122 0.122 0.121 2.744 2.746 2.715 5.518 5.521 5.459 6.74 6.98 3 790 382 172.723 740 5 0.124 0.124 0.123 2.766 2.766 2.718 5.501 5.500 5.406 2.22 4.95 3 250 762 174.891 641 2 0.126 0.126 0.126 2.769 2.768 2.764 5.438 5.437 5.429 2.02 5.55 2 820 1 452 175.755 229 0 0.127 0.127 0.127 2.775 2.775 2.771 5.425 5.424 5.415 1.71 3.79 217 2 452 176.064 045 8 0.128 0.128 0.128 2.779 2.779 2.773 5.422 5.422 5.407 1.42 3.46 192 Formula 176.625 0.129 0.129 0.129 2.780 2.780 2.780 5.406 5.406 5.406 0 0 0
下载: 导出CSV
表 3 不同顶点数量下圆柱体三角化计算结果
Table 3. Calculation results of cylinder with different vertex numbers
Vertex
numberMass/
gMoment of inertia/
(g·m2)Impulse/
(mN·s)Velocity/
(mm·s-1)Angular velocity/
(10-8rad·s-1)Jx Jy Jz Px Py Pz Δvx Δvy Δvz ωx ωy ωz 32 347.290 1 0.560 5 0.560 5 0.295 7 5.305 5.302 3.603 5.249 5.249 3.565 3.72×10-4 4.75×10-4 2.52 62 365.152 7 0.597 2 0.597 2 0.326 7 5.369 5.369 3.788 5.053 5.053 3.565 1.21×10-8 5.23×10-8 2.50 122 369.618 3 0.606 7 0.606 7 0.334 8 5.386 5.386 3.835 5.006 5.006 3.565 3.52×10-16 2.76×10-16 2.39 162 369.618 3 0.606 7 0.606 7 0.334 8 5.386 5.386 3.835 5.006 5.006 3.565 3.52×10-16 2.75×10-16 2.39 202 369.618 3 0.606 7 0.606 7 0.334 8 5.386 5.386 3.835 5.006 5.006 3.565 3.52×10-16 2.78×10-16 2.39 242 370.305 3 0.608 5 0.608 5 0.336 4 5.388 5.388 3.844 4.997 4.997 3.565 2.01×10-16 1.92×10-16 2.40 Formula 370.992 4 0.609 9 0.609 9 0.337 6 5.389 5.389 3.849 4.988 4.988 3.563 0 0 0
下载: 导出CSV
-
[1] LIOU J C.An active debris removal parametric study for LEO environment remediation[J].Advances in Space Research, 2011, 47:1865-1876. doi: 10.1016/j.asr.2011.02.003 [2] 龚自正, 徐坤博, 牟永强, 等.空间碎片环境现状与主动移除技术[J].航天器环境工程, 2014, 31(2):129-135. http://mall.cnki.net/magazine/article/HTHJ201402004.htmGONG Z Z, XU K B, MU Y Q, et al.The space debris environment and the active debris removal techniques[J].Spacecraft Environment Engineering, 2014, 31(2):129-135. http://mall.cnki.net/magazine/article/HTHJ201402004.htm [3] 杨武霖, 龚自正, 牟永强, 等.天基激光清除空间碎片方案与可行性研究[J].航天器环境工程, 2015, 32(4):361-365. doi: 10.3969/j.issn.1673-1379.2015.04.004YANG W L, GONG Z Z, MU Y Q, et al.Active removal of space debris by space-based laser system and its feasibility analysis[J].Spacecraft Environment Engineering, 2015, 32(4):361-365. doi: 10.3969/j.issn.1673-1379.2015.04.004 [4] 张品亮, 龚自正, 杨武霖, 等.激光移除空间碎片过程的三维仿真与建模[J].宇航学报, 2017, 38(3):323-330. http://mall.cnki.net/magazine/Article/HKXB201206005.htmZHANG P L, GONG Z Z, YANG W L, et al.Three-dimensional simulation and modeling on removing orbital debris with laser[J].Journal of Astronautics, 2017, 38(3):323-330. http://mall.cnki.net/magazine/Article/HKXB201206005.htm [5] PHIPPS C R.A laser optical system to re-enter or lower low earth orbit space debris[J].Acta Astronautica, 2014, 93:418-429. doi: 10.1016/j.actaastro.2013.07.031 [6] PHIPPS C R, TURNER T P, HARRISON R F, et al.Impulse coupling to targets in vacuum by KrF, HF, and CO2 single-pulse lasers[J].Applied Physics, 1988, 64:1083-1096. doi: 10.1063/1.341867 [7] PHIPPS C R, BAKER K L, LIBBY S B, et al.Removing orbital debris with laser[J].Advances in Space Research, 2012, 49:1283-1300. doi: 10.1016/j.asr.2012.02.003 [8] 金星, 常浩, 洪延姬, 等.激光辐照不规则空间碎片冲量矢量计算[J].强激光与粒子束, 2012, 24(8):1956-1960. http://www.opticsjournal.net/abstract.htm?id=OJ120809000072rXt1w4JIN X, CHANG H, HONG Y J, et al.Impulse calculation for irregularly shaped space debris under laser irradiation[J].High Power Laser and Particle Beams, 2012, 24(8):1956-1960. http://www.opticsjournal.net/abstract.htm?id=OJ120809000072rXt1w4 [9] 张品亮, 龚自正, 汤秀章, 等.激光驱动典型几何形状碎片运动建模研究[J].航天器环境工程, 2017, 34(4):138-140. http://cdmd.cnki.com.cn/Article/CDMD-10611-1015971112.htmZHANG P L, GONG Z Z, TANG X Z, et al.Dynamic modeling of laser-driven space debris of typical shapes[J].Spacecraft Environment Engineering, 2017, 34(4):138-140. http://cdmd.cnki.com.cn/Article/CDMD-10611-1015971112.htm [10] LIEDAHL D A, LIBBY S B, RUBENCHIK A. Momentum transfer by laser ablation of irregularly shaped space debris: LLNL-PROC-423224[R]. AIP, 2010. [11] LIEDAHL D A, RUBENCHIK A, LIBBY S B, et al.Pulsed laser interactions with space debris:target shape effects[J].Advances in Space Research, 2013, 52:895-915. doi: 10.1016/j.asr.2013.05.019 [12] PHIPPS C R, BONNAL C.A spaceborne, pulsed UV laser system for re-entering or nudging LEO debris, and re-orbiting GEO debris[J].Acta Astronautica, 2016, 118:224-236. doi: 10.1016/j.actaastro.2015.10.005 [13] SCHALL W O.Laser radiation for cleaning space debris from lower earth orbits[J].Journal of Spacecraft and Rockets, 2002, 39:81-91. doi: 10.2514/2.3785 [14] 常浩, 金星, 周伟静.纳秒激光烧蚀铝等离子体羽流膨胀特性实验[J].红外与激光工程, 2013, 42:43-46. doi: 10.3969/j.issn.1007-2276.2013.z1.009CHANG H, JIN X, ZHOU W J.Experiment research on plume expansion induced by nanosecond laser ablation Al[J].Infrared and Laser Engineering, 2013, 42:43-46. doi: 10.3969/j.issn.1007-2276.2013.z1.009 [15] 廖家志. 基于曲面约束的空间Delaunay三角剖分方法研究[D]. 成都: 电子科技大学, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10614-1013332229.htmLIAO J Z. The research of space Delauany triangulation constrainted by surface[D]. Chengdu: University of Electronic Science and Technology of China, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10614-1013332229.htm [16] Shape model of asteroid (101955) Bennu[EB/OL]. [2018-01-10]. https://sbn.psi.edu/pds/resource/bennushape.html. -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 8017
- HTML全文浏览量: 3293
- PDF下载量: 454
