




Experimental Investigation and Modeling of Strain-Rate Dependence on Tensile Behavior of Silicone Rubbers
-
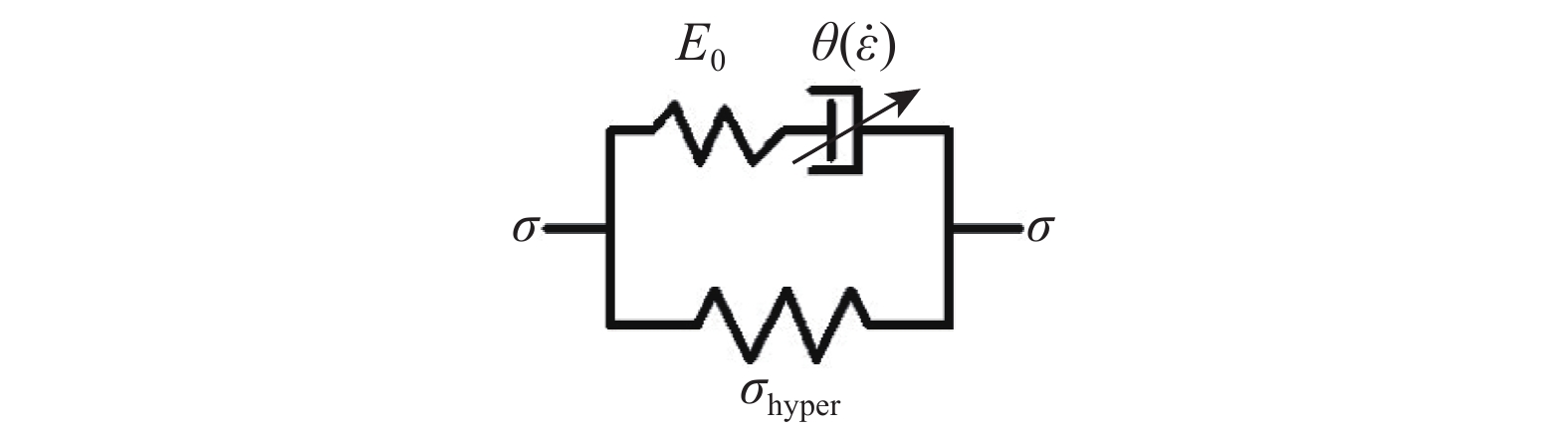
摘要: 为了研究硅橡胶在不同应变率下的冲击拉伸响应,对硅橡胶板材进行了应变率为0.001 s–1的准静态单向拉伸测试、应变率为15 s–1的中应变率单向拉伸测试以及应变率分别为350 s–1和1400 s–1的高应变率单向拉伸测试。实验结果表明,硅橡胶的单向拉伸力学行为呈现出明显的非线性弹性和应变率相关性特征。在实验结果的基础上,提出了一个可用于描述硅橡胶在不同应变率下拉伸力学响应的宏观唯象黏超弹性本构模型。该模型假设硅橡胶在拉伸加载下的力学响应是超弹性响应和黏弹性响应的组合,其一维流变学形式可以简述为一个超弹性的弹簧和一个松弛时间率相关的Maxwell体的并联。模型拟合结果与实验结果的对比显示,该模型能有效表征硅橡胶在大应变率范围内的非线性拉伸力学行为。Abstract: To investigate the impact tensile response of silicone rubber subjected to different strain rates, quasi-static uniaxial tension tests at the strain rate of 0.001 s–1, moderate strain-rate tensile tests at the strain rate of 15 s–1 and high strain-rate tensile tests at the strain rates of 350 and 1400 s–1 were performed. Experimental results show that the tensile behavior of the filled silicone rubber exhibits apparent nonlinear elastic characteristic and strain-rate sensitivity. A phenomenological visco-hyperelastic constitutive model was proposed based on the obtained responses. The model is composed of a hyper-elastic spring and a Maxwell element with rate-dependent relaxation time, corresponding to hyper-elasticity and viscoelasticity respectively. The model results have good agreement with the experimental data, indicating that the model has the ability to describe the nonlinear and rate-dependent tension behavior of the filled silicone rubber.
-
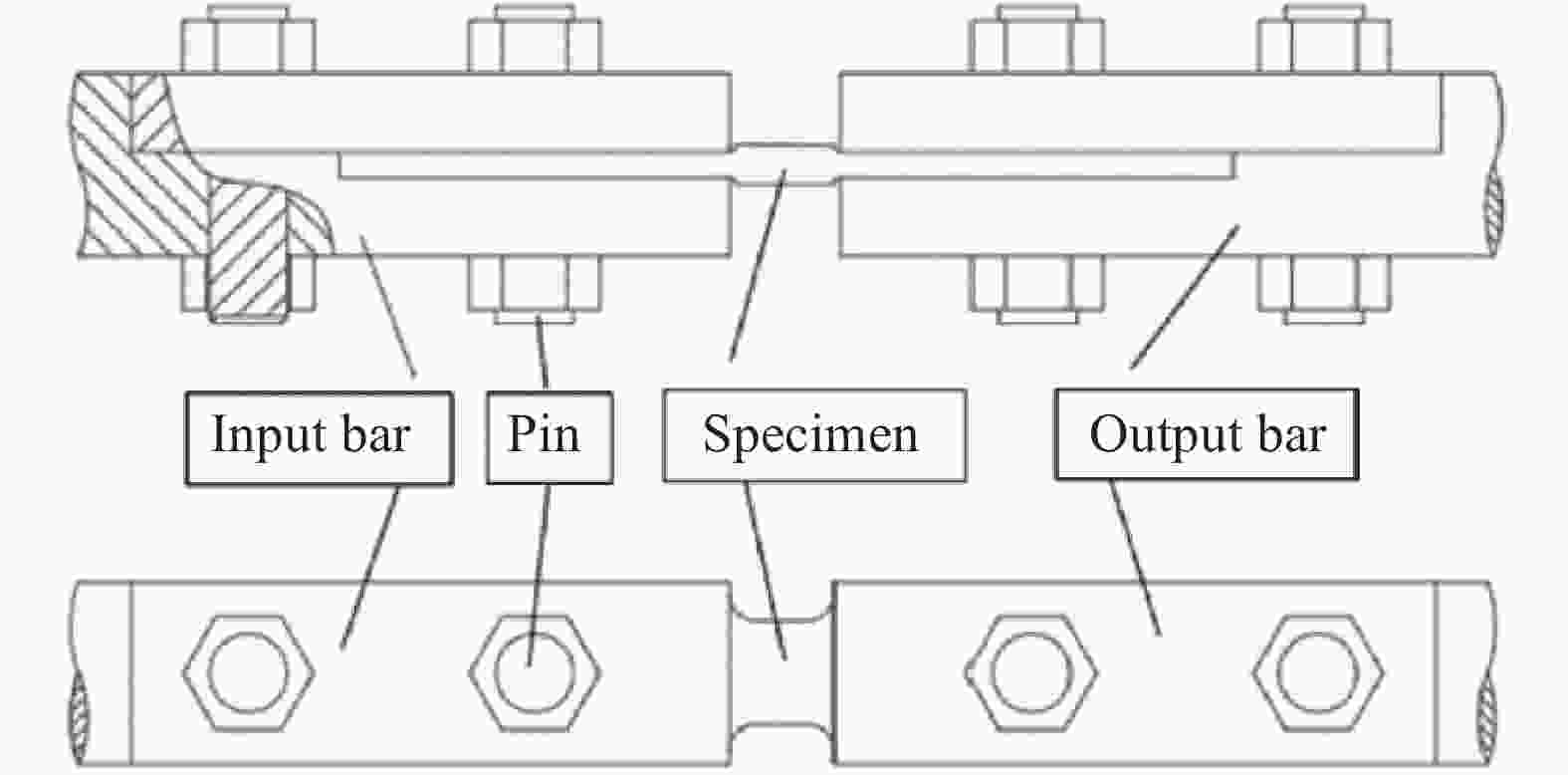
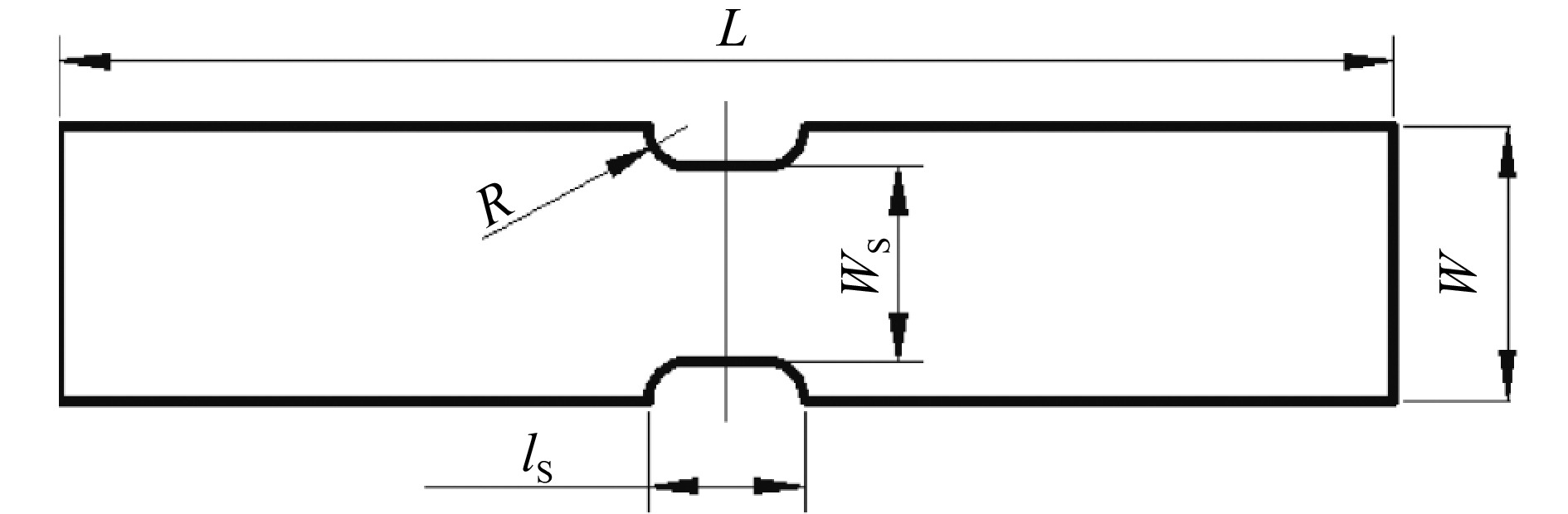
图 2 试样与入射/透射杆连接方式示意图
Figure 2. Schematic of the connection between the sample and the input/output bar
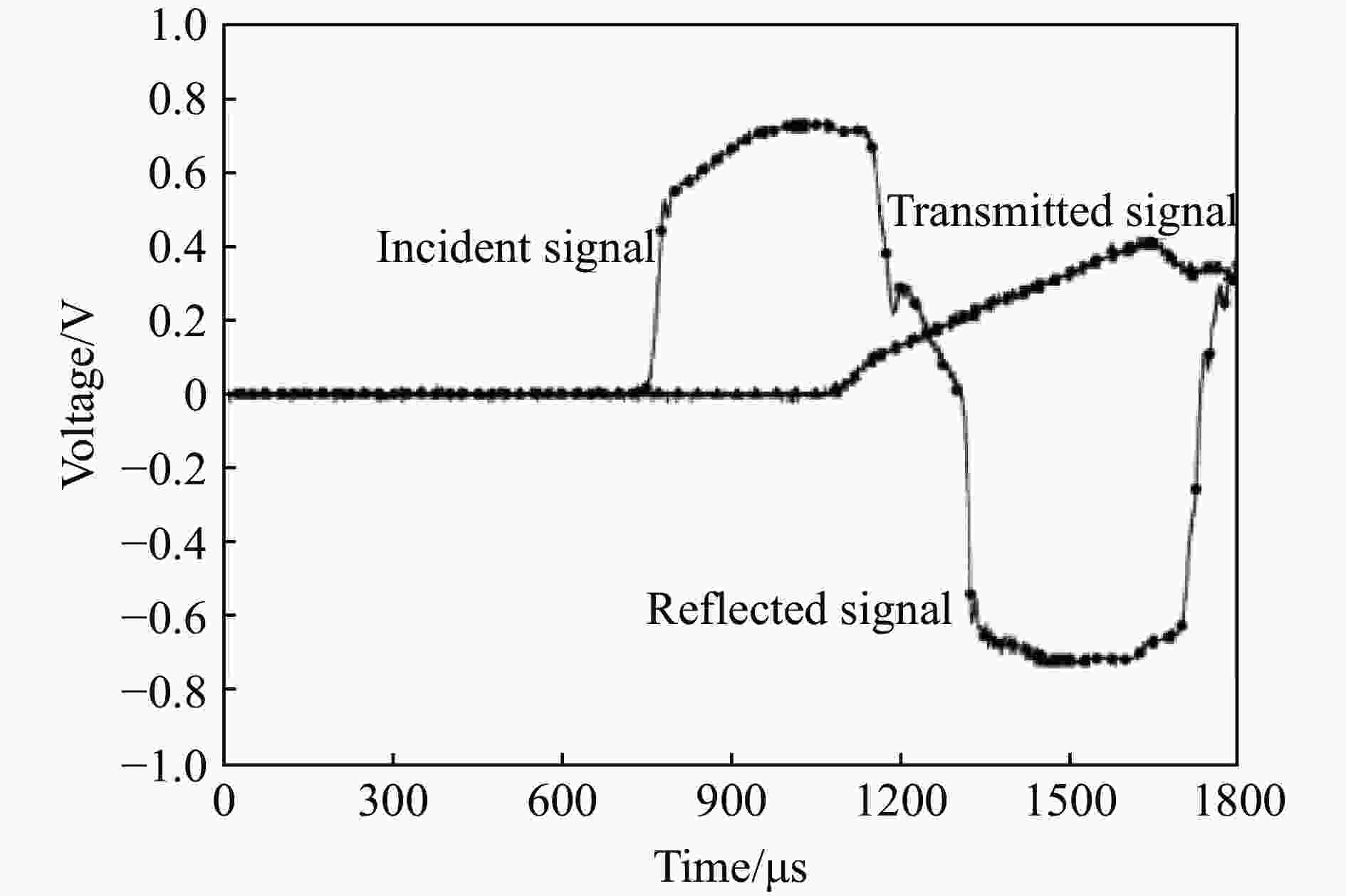
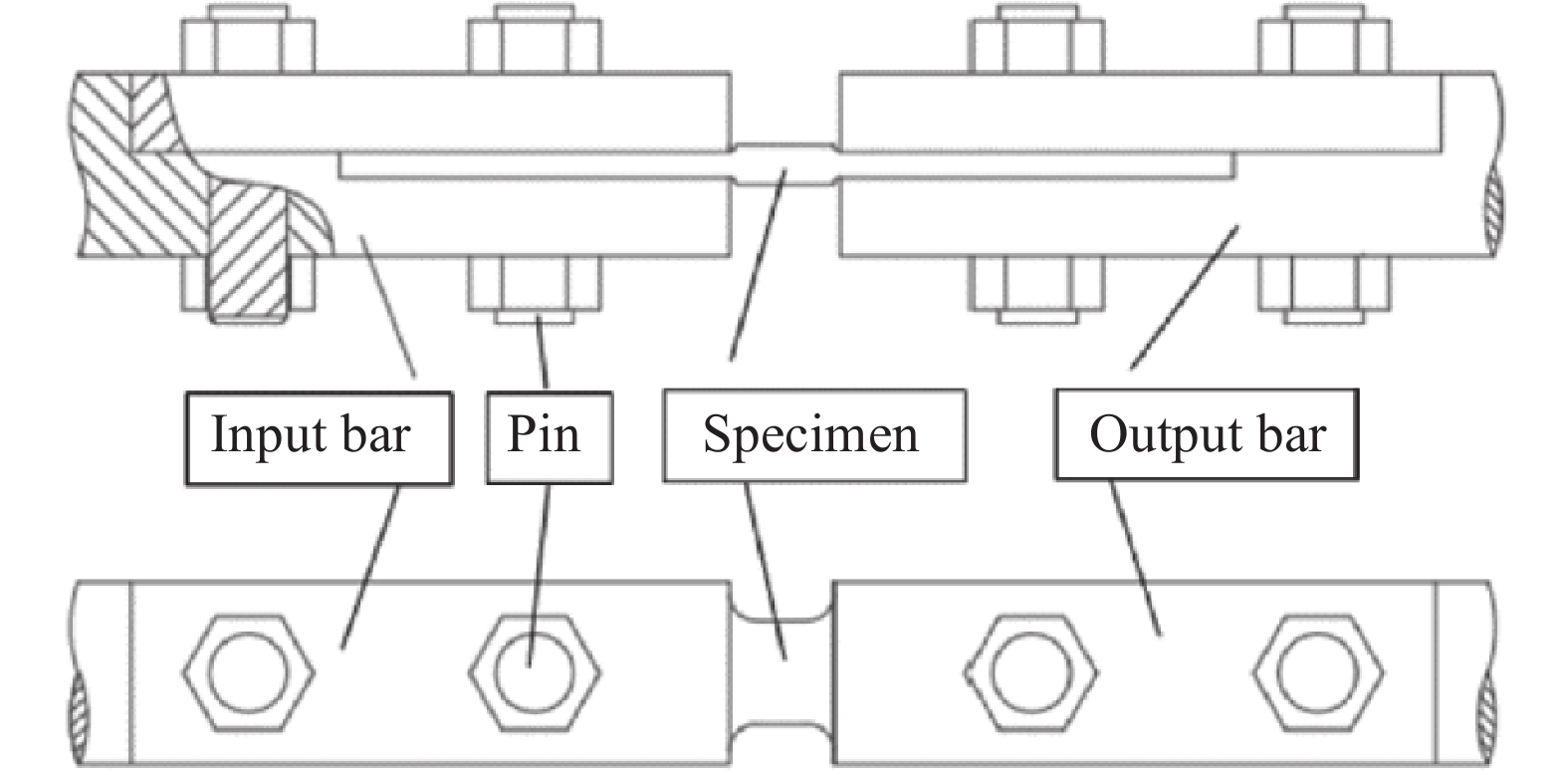
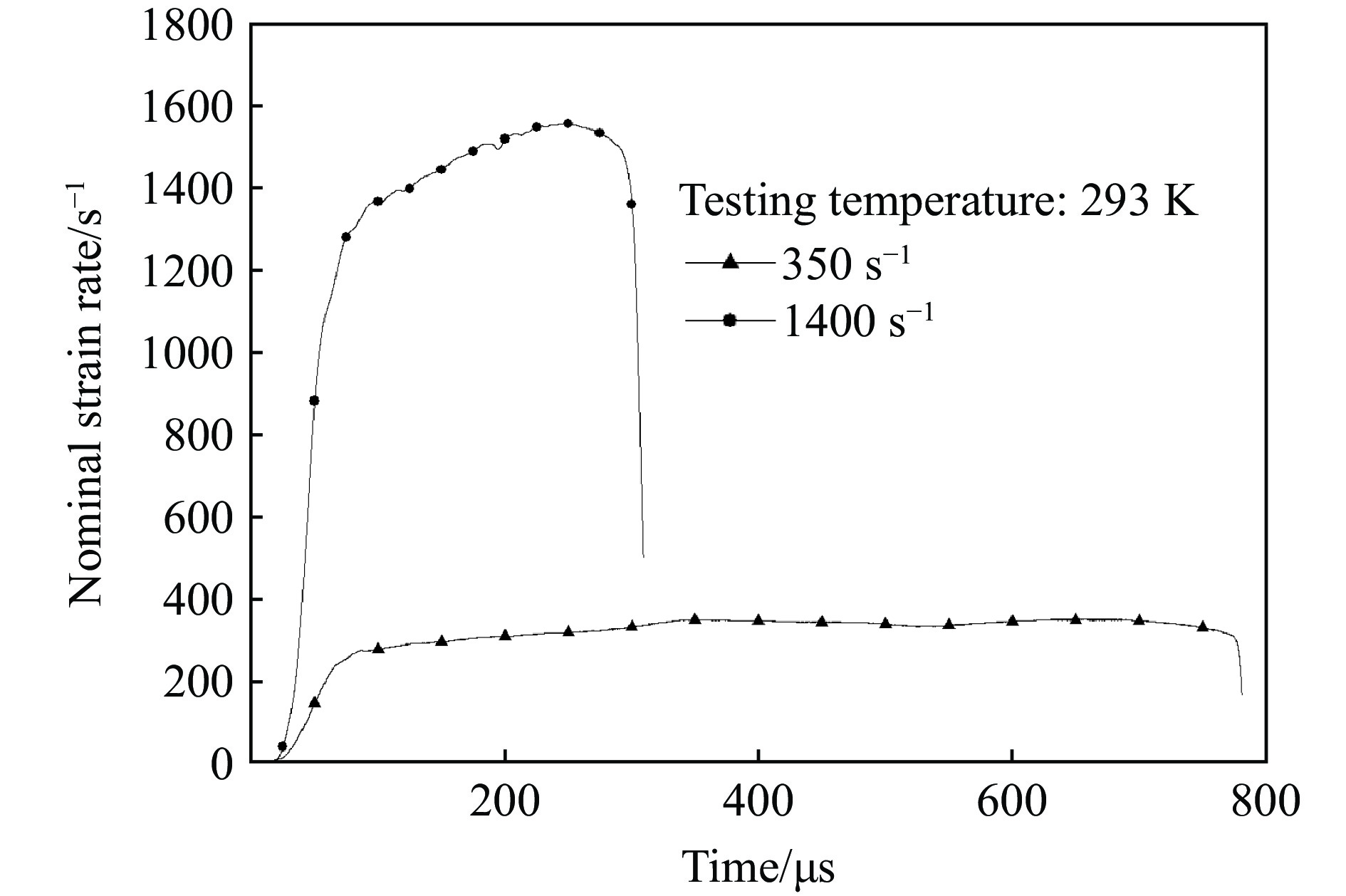
图 3 实测的入射、反射和透射波波形
Figure 3. Measured incident, reflected, and transmitted wave waveforms
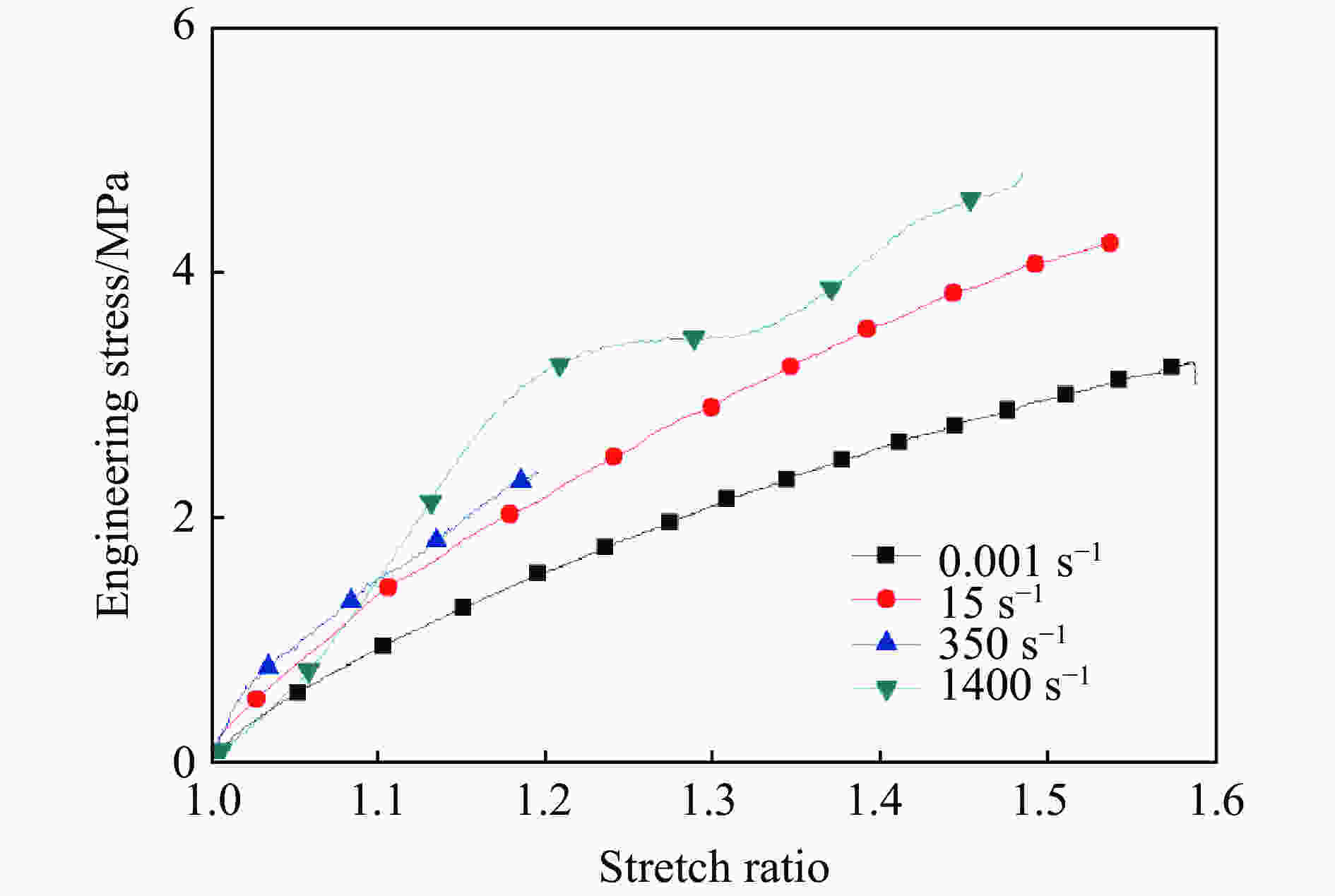
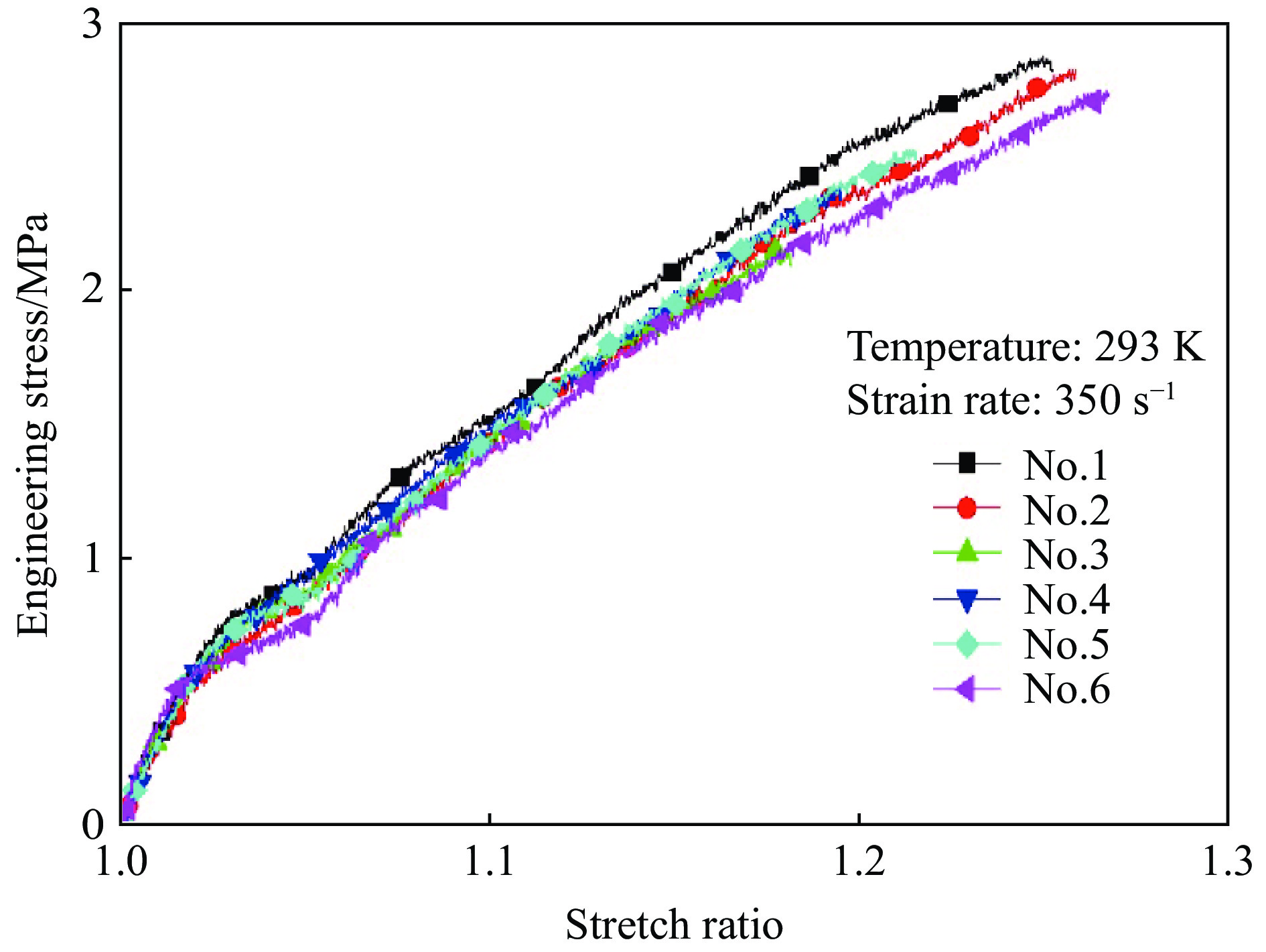
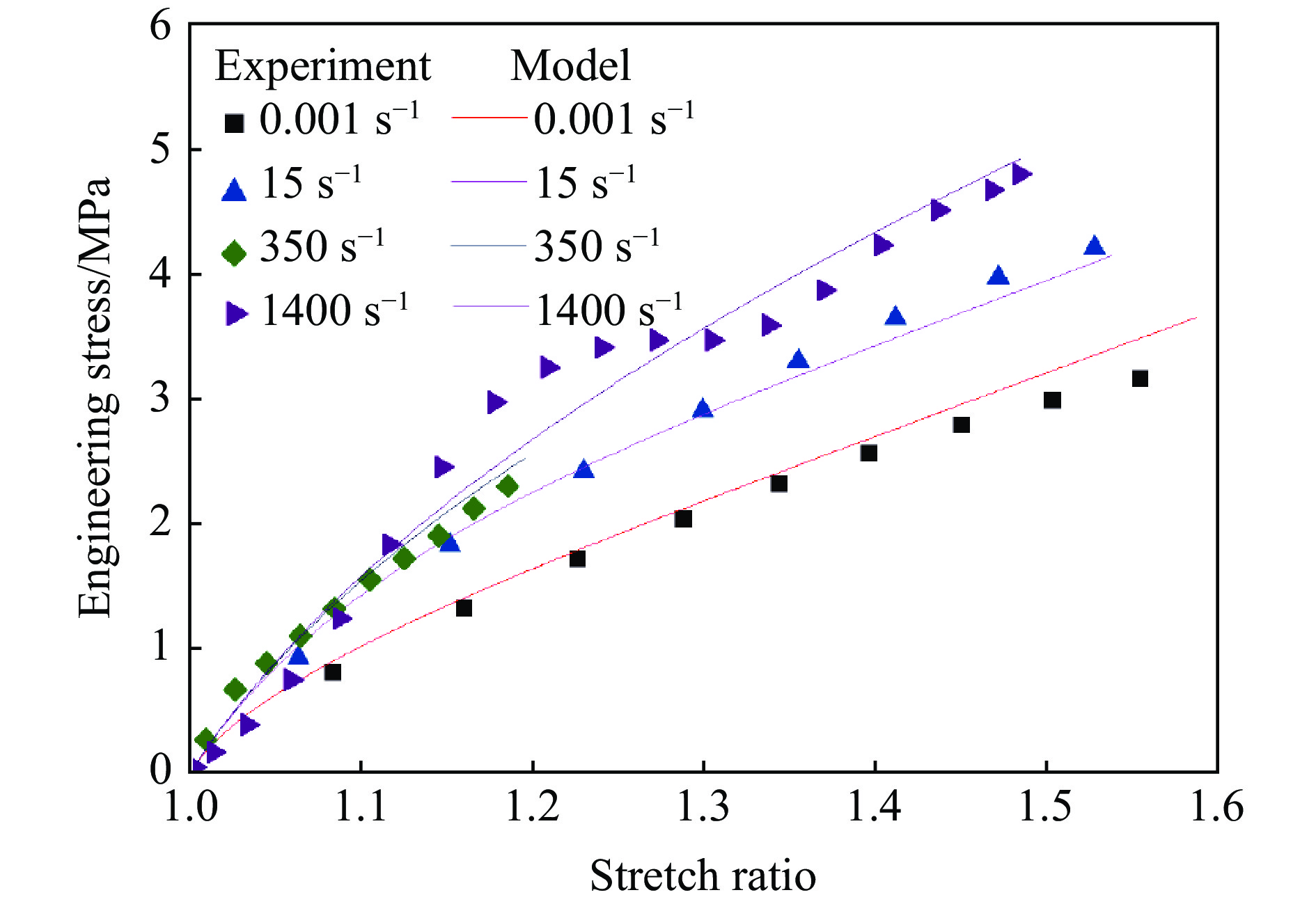
图 6 不同应变率下硅橡胶工程应力-伸长比曲线
Figure 6. Engineering stress-stretch ratio of silicone rubber at various strain rates
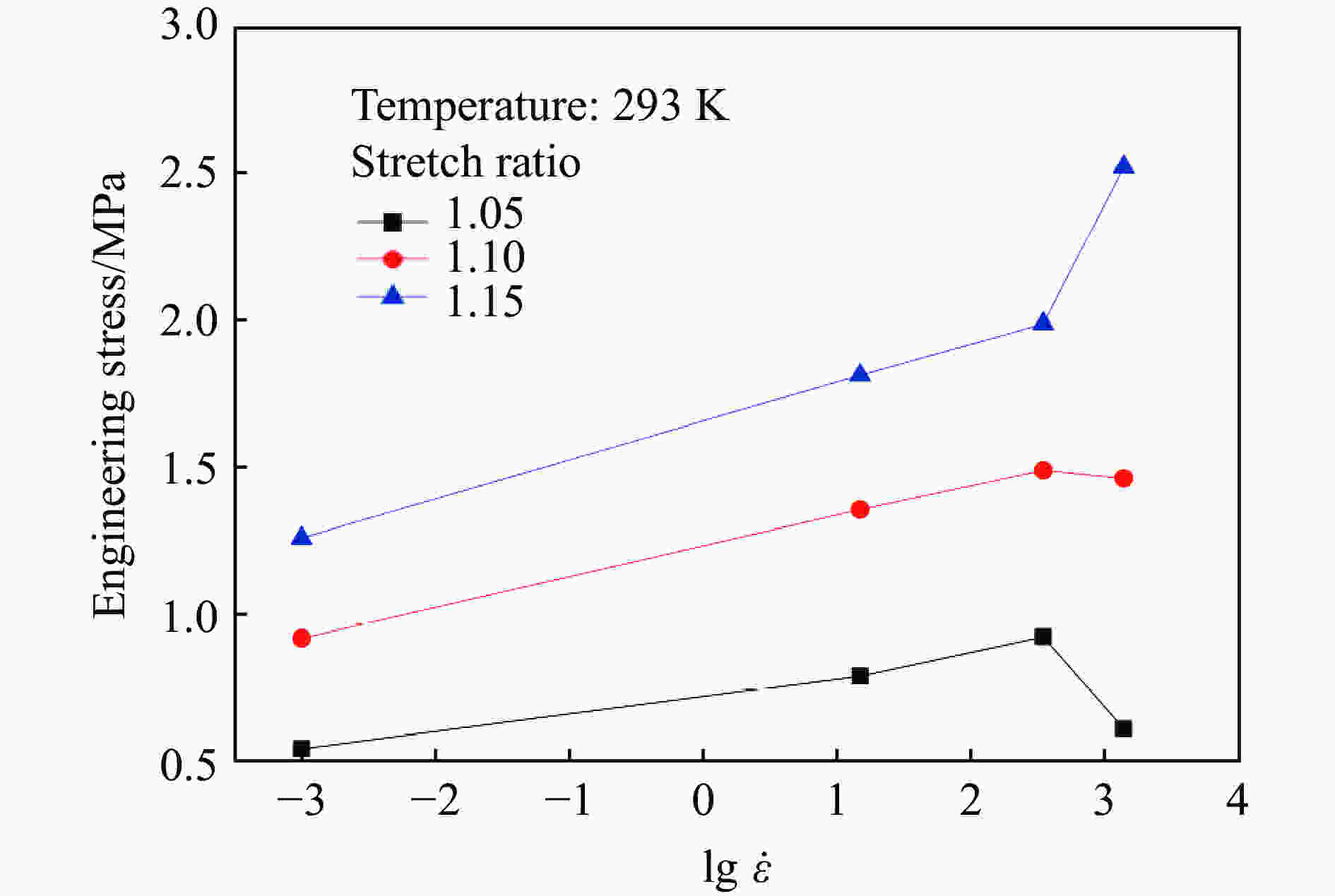
图 7 定伸长应力随对数应变率变化关系
Figure 7. Stress at a given stretch ratio varying with logarithm of strain rate
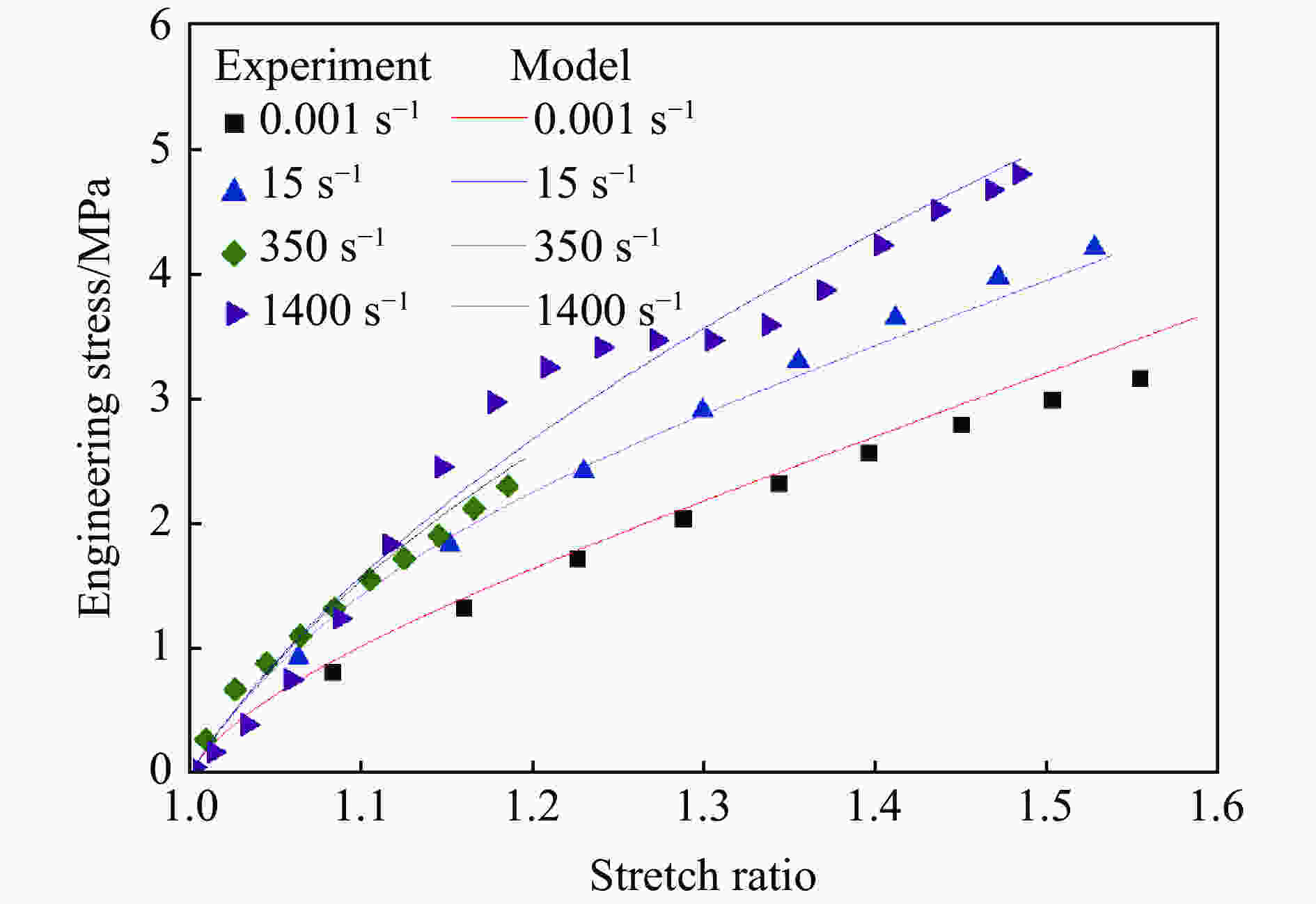
图 10 模型拟合结果与实验结果对比
Figure 10. Comparison between model fitting and experimental results
表 1 模型参数值
Table 1. Parameter values
C/MPa a/MPa b E0/MPa ${{\theta _0}}$/s ${\,\beta}$ 2.862 –2.383 0.170 14.02 31.69 0.756 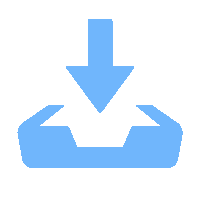 下载: 导出CSV
下载: 导出CSV
-
[1] MEUNIER L, CHAGNON G, FAVIER D, et al. Mechanical experimental characterization and numerical modelling of an unfilled silicone rubber [J]. Polymer Testing, 2008, 27(6): 765–777. doi: 10.1016/j.polymertesting.2008.05.011 [2] MACHADO G, CHAGNON G, FAVIER D. Induced anisotropy by the Mullins effect in filled silicone rubber [J]. Mechanics of Materials, 2012, 50: 70–80. doi: 10.1016/j.mechmat.2012.03.006 [3] BENEVIDES R O, NUNES L C S. Mechanical behavior of the alumina-filled silicone rubber under pure shear at finite strain [J]. Mechanics of Materials, 2015, 85: 57–65. doi: 10.1016/j.mechmat.2015.02.011 [4] 胡时胜, 王正道, 赵立中. 泡沫硅橡胶动态力学性能的实验研究 [J]. 高分子材料科学与工程, 1999, 15(2): 113–115. doi: 10.3321/j.issn:1000-7555.1999.02.032HU S S, WANG Z D, ZHAO L Z. Experimental study of dynamic mechanical behaviors of silicone rubber foam [J]. Polymer Materials Science and Engineering, 1999, 15(2): 113–115. doi: 10.3321/j.issn:1000-7555.1999.02.032 [5] 赵习金, 卢芳云, 林玉亮. 硅橡胶的动态压缩实验和力学性能研究 [J]. 高压物理学报, 2004, 18(4): 328–332. doi: 10.3969/j.issn.1000-5773.2004.04.007ZHAO X J, LU F Y, LIN Y L. Research on dynamic compressive testing and mechanical properties of silicon rubber [J]. Chinese Journal of High Pressure Physics, 2004, 18(4): 328–332. doi: 10.3969/j.issn.1000-5773.2004.04.007 [6] SHERGOLD O A, FLECK N A, RADFORD D. The uniaxial stress versus strain response of pig skin and silicone rubber at low and high strain rates [J]. International Journal of Impact Engineering, 2006, 32(9): 1384–1402. doi: 10.1016/j.ijimpeng.2004.11.010 [7] TRELOAR L R G. The physics of rubber elasticity [M]. New York: Oxford University Press, 1975. [8] KILIAN H G, UNSELD K. Rubber elasticity and network structure [J]. Colloid and Polymer Science, 1986, 264(1): 9–18. doi: 10.1007/BF01410303 [9] WU P D, GIESSEN E V D. On improved network models for rubber elasticity and their applications to orientation hardening in glassy polymers [J]. Journal of the Mechanics & Physics of Solids, 1993, 41(3): 427–456. [10] ARRUDA E M, BOYCE M C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials [J]. Journal of the Mechanics and Physics of Solids, 1993, 41(2): 389–412. doi: 10.1016/0022-5096(93)90013-6 [11] OGDEN R W. On constitutive relations for elastic and plastic materials [D]. Cambridge: University of Cambridge, 1970. [12] RIVLIN R S. Large elastic deformations of isotropic materials IV: further developments of the general theory [J]. Philosophical Transactions of the Royal Society A: Mathematical Physical & Engineering Sciences, 1948, 241: 379–397. [13] ANAND L. On H. Hencky’s approximate strain-energy function for moderate deformations [J]. Journal of Applied Mechanics, 1979, 46(1): 78–82. doi: 10.1115/1.3424532 [14] 黄德进, 孙紫建, 王礼立. 高聚物材料动态本构关系对PP/PA共混物的应用研究 [J]. 材料工程, 2006(3): 3–5. doi: 10.3969/j.issn.1001-4381.2006.03.001HUANG D J, SUN Z J, WANG L L. Study on PP/PA blended material by polymer dynamic constitutive relation [J]. Journal of Materials Engineering, 2006(3): 3–5. doi: 10.3969/j.issn.1001-4381.2006.03.001 [15] 吕亚男, 郭玲梅, 邓志方, 等. 基于自动网格法的硅橡胶温度相关的拉伸力学行为 [J]. 高分子材料科学与工程, 2016, 32(2): 104–108.LÜ Y N, GUO L M, DENG Z F, et al. Temperature-dependent tensile behavior of silicon rubber using automated grid method [J]. Polymer Materials Science and Engineering, 2016, 32(2): 104–108. [16] 郭玲梅, 吕亚男, 邓志方, 等. 硅橡胶动态拉伸力学性能的实验研究 [J]. 北京理工大学学报(自然科学版), 2016, 36(Suppl 1): 111–113, 130.GUO L M, LÜ Y N, DENG Z F, et al. Experimental study on dynamic tensile properties of silicone rubber [J]. Transactions of Beijing Institute of Technology, 2016, 36(Suppl 1): 111–113, 130. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 7205
- HTML全文浏览量: 3506
- PDF下载量: 24
