




A Compensation Method of Photonic Doppler Velocimeter Based on Two Laser Sources
-
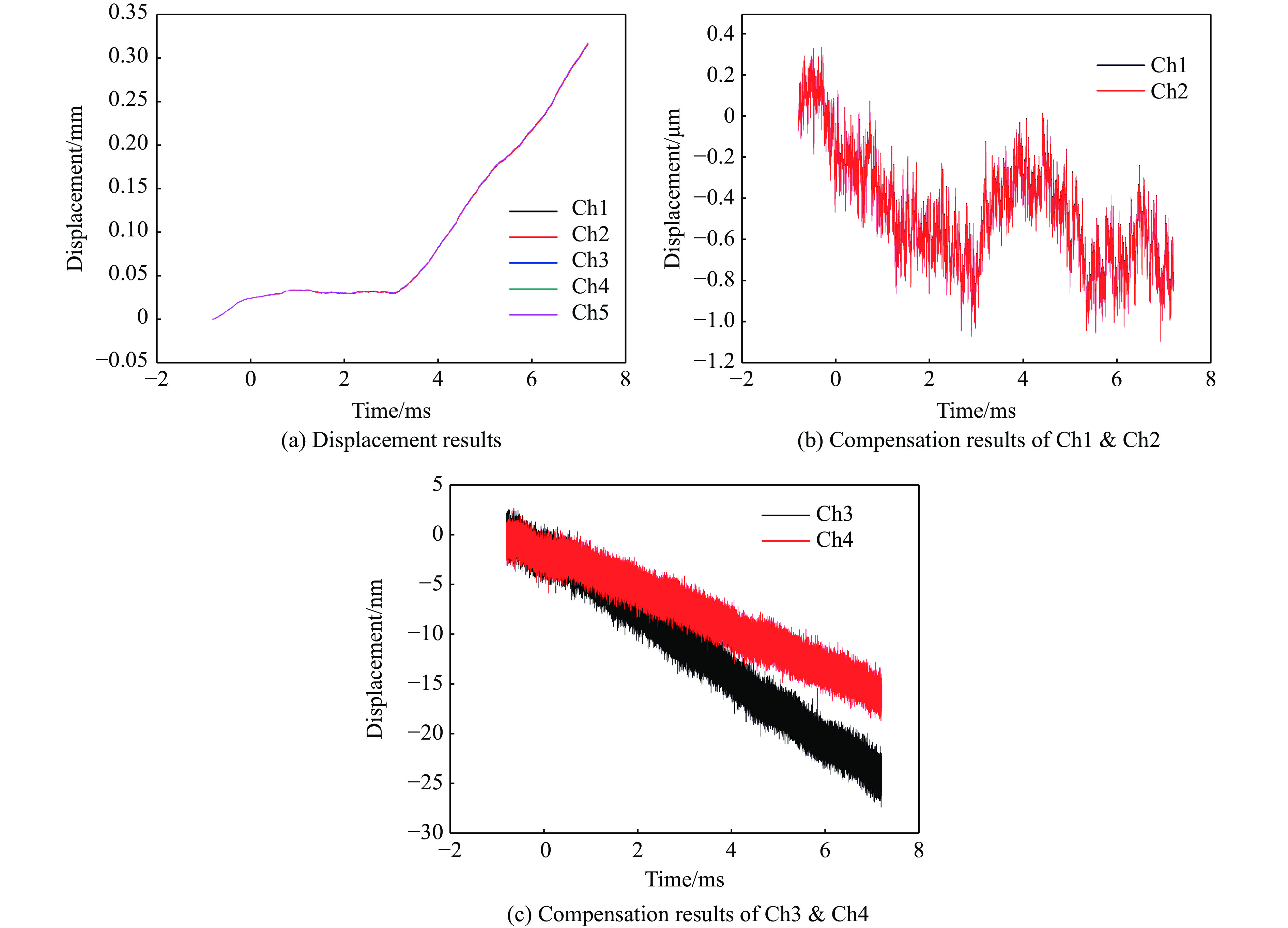
摘要: 针对结构动态响应测试中的大量程负向速度测量问题,设计了基于双光源干涉的光纤速度干涉仪(PDV)测试系统,与单光源PDV系统相比,大幅拓宽了负向测速范围。但在爆炸实验中发现,由于光源波长波动产生了位移基线漂移和振荡问题。为此,引入一路参考反射镜,产生双光源干涉本底信号,用于补偿位移基线,并研究了数据补偿算法。经实验验证,补偿后的位移基线漂移量为微米级,双光源模式及补偿方法可行且有效。
-
关键词:
- 光子多普勒速度测量技术 /
- 时频变换 /
- 数据补偿 /
- 速度测量
Abstract: In order to solve the problem of large range negative velocity measurement in dynamic response measurement of structure, a photonic Doppler velocimetry (PDV) measurement system based on two laser sources is designed. Compared with the single laser source PDV system based on acoustic optical modulator, the range of negative velocity measurement is greatly improved. However, it is found in the explosion experiment that the displacement baseline drift and oscillation are caused by the wavelength fluctuation of the laser source. For this reason, one reference reflector is introduced to generate the background signal which is used to compensate the displacement. Then, the data compensation algorithm is studied. The experimental results show that the displacement baseline drift after compensation is in the order of micron. PDV based on two laser sources and the compensation method are feasible and effective. -
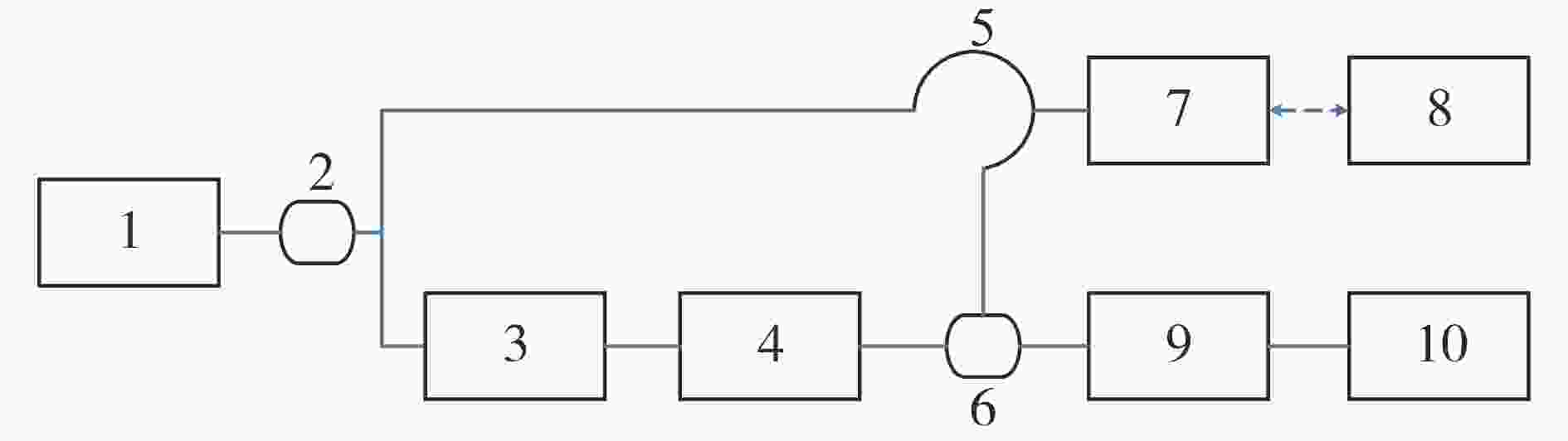
图 1 旁轴式外差结构PDV(1.激光器,2.分束器,3.移频器,4.衰减器,5.环形器,6.合束器,7.探头,8.被测物,9.探测器,10.示波器)
Figure 1. PDV using heterodyne techniques (1. Laser; 2. Splitter; 3. Modulator; 4. Attenuator; 5. Circulator; 6. Combiner; 7. Probe; 8. Target; 9. Detector; 10. Oscilloscope)
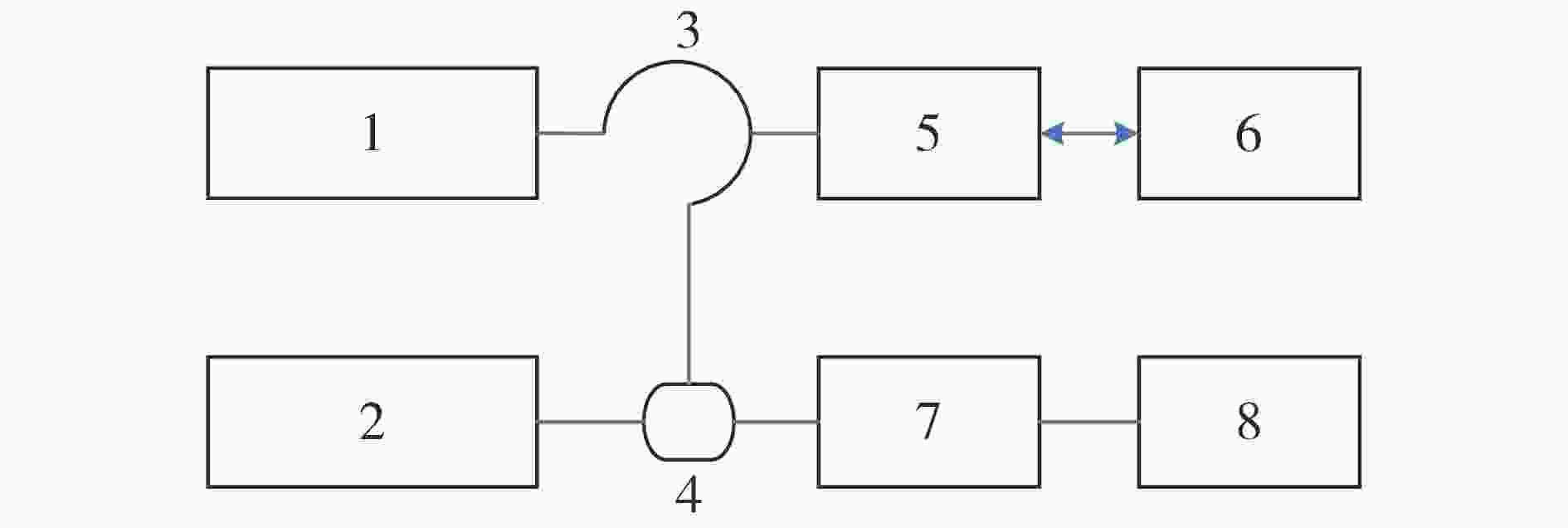
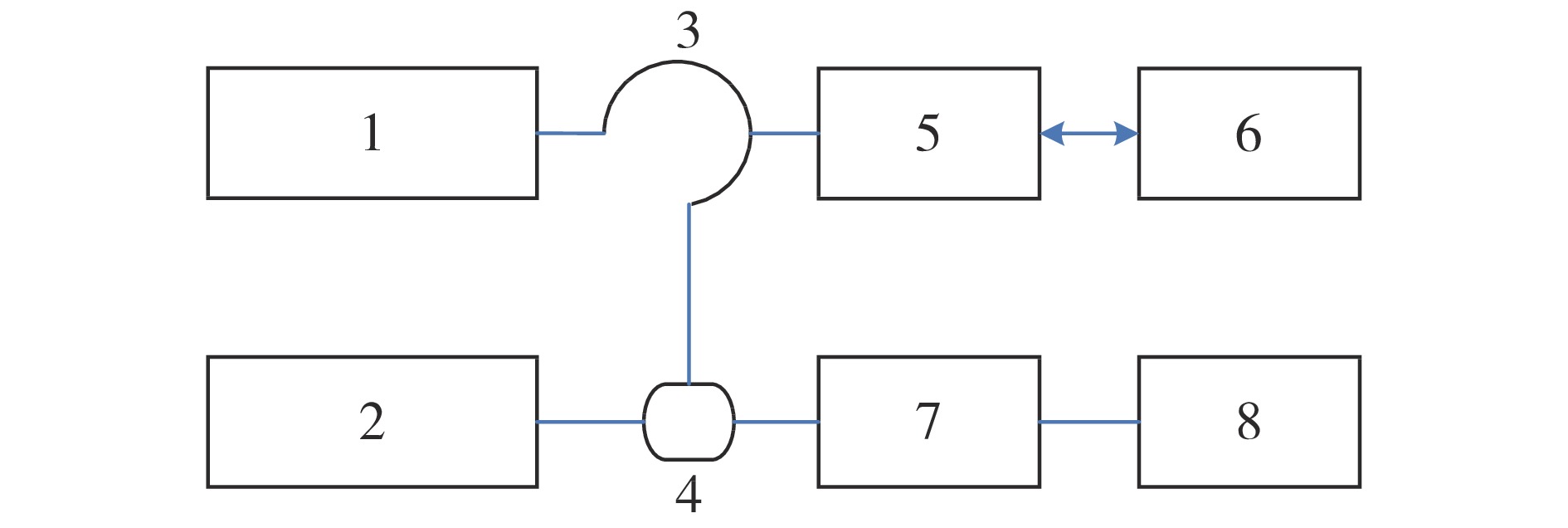
图 2 双光源模式PDV(1.信号激光器,2.参考激光器,3.环形器,4.合束器,5.探头,6.被测物,7.探测器,8.示波器)
Figure 2. PDV with two laser sources (1. Signal laser; 2. Reference laser; 3. Circulator; 4. Combiner; 5. Probe; 6. Target; 7. Detector; 8. Oscilloscope)
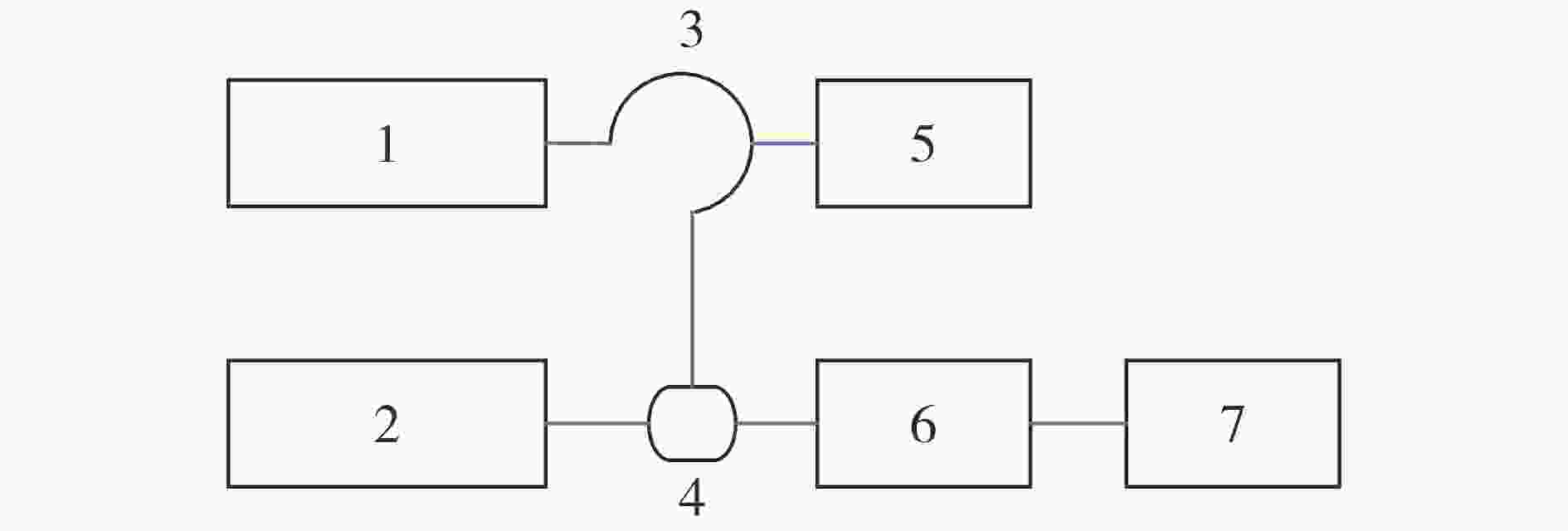
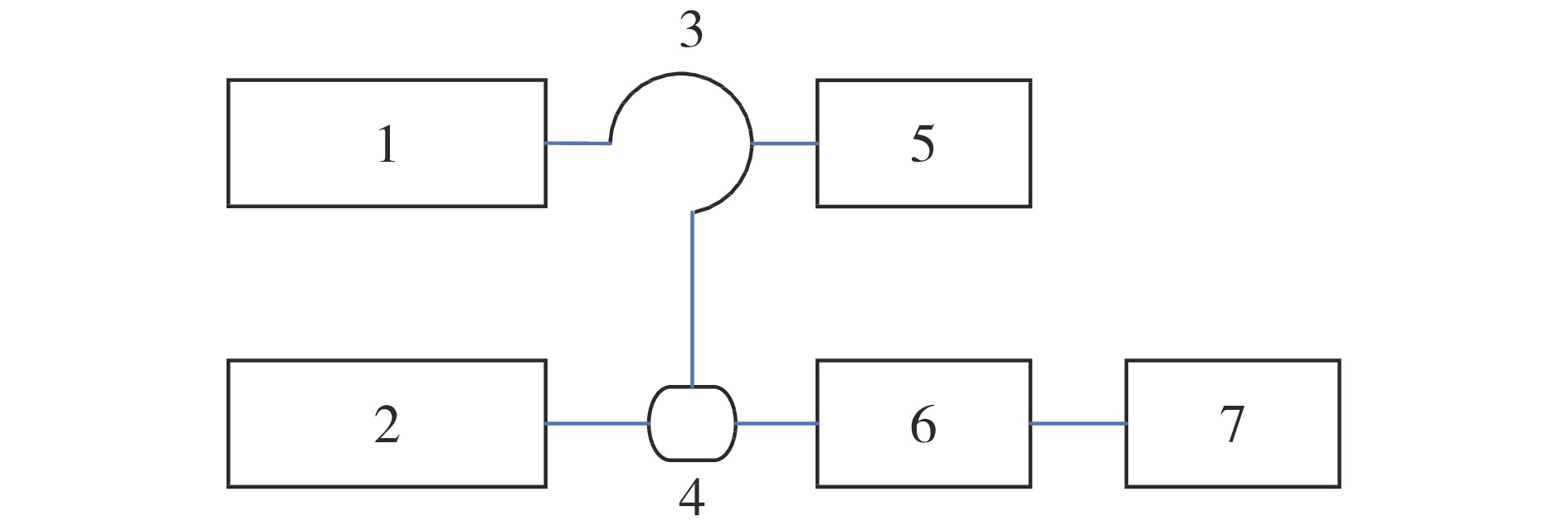
图 3 补偿通道示意图(1.信号激光器,2.参考激光器,3.环形器,4.合束器,5.反射镜,6.探测器,7.示波器)
Figure 3. Schematic diagram of compensation channel (1. Signal laser; 2. Reference laser; 3. Circulator; 4. Combiner; 5. Reflector; 6. Detector; 7. Oscilloscope)
-
[1] BARKER L M, HOLLENBACH R E. Laser interferometer for measuring high velocities of any reflecting surface [J]. Journal of Applied Physics, 1972, 43(11): 4669–4675. doi: 10.1063/1.1660986 [2] HEMSING W F. Velocity sensing interferometer modification [J]. Review of Scientific Instruments, 1979, 50(1): 73–78. doi: 10.1063/1.1135672 [3] 傅迎光. 基于调制光源的光子多普勒测速系统 [D]. 北京: 北京交通大学, 2014: 14–18.FU Y G. Photonic Doppler velocimetry system based on modulated light source [D]. Beijing: Beijing Jiaotong University, 2014: 14–18. [4] 朱振, 胡艳, 吴立志, 等. 基于PDV技术的微型雷管爆炸驱动飞片速度测试研究 [J]. 爆破器材, 2016, 45(5): 56–61. doi: 10.3969/j.issn.1001-8352.2016.05.012ZHU Z, HU Y, WU L Z, et al. Investigation on flyer velocity driven by miniaure detonators based on the PDV technology [J]. Explosive Materials, 2016, 45(5): 56–61. doi: 10.3969/j.issn.1001-8352.2016.05.012 [5] 吴立志, 陈少杰, 叶迎华, 等. 用于瞬态高速飞片速度测量的光子多普勒测速系统 [J]. 红外与激光工程, 2016, 45(12): 263–267.WU L Z, CHEN S J, YE Y H, et al. Photonic Doppler velocimetry used for instant velocity measurement of high-speed small flyer [J]. Infrared and Laser Engineering, 2016, 45(12): 263–267. [6] 李旭, 安丰江, 吴成, 等. 一种基于PDV的近场冲击波高压测量技术 [J]. 中国测试, 2018, 44(10): 134–138. doi: 10.11857/j.issn.1674-5124.2018.10.023LI X, AN F J, WU C, et al. A near-field shock wave measurement technique based on PDV [J]. China Measurement & Test, 2018, 44(10): 134–138. doi: 10.11857/j.issn.1674-5124.2018.10.023 [7] 邵磊, 刘宏利, 贾明雁, 等. 激光多普勒爆破容器高速变形动态测量技术的研究 [J]. 纳米技术与精密工程, 2006, 4(3): 176–181. doi: 10.3969/j.issn.1672-6030.2006.03.002SHAO L, LIU H L, JIA M Y, et al. Technique of dynamic measurement of high velocity deformation of explosive container based on laser Doppler effect [J]. Nanotechnology and Precision Engineering, 2006, 4(3): 176–181. doi: 10.3969/j.issn.1672-6030.2006.03.002 [8] 杨军, 王克逸, 徐海斌, 等. 光纤位移干涉仪的研制及其在Hopkinson压杆实验中的应用 [J]. 红外与激光工程, 2013, 42(1): 102–107. doi: 10.3969/j.issn.1007-2276.2013.01.019YANG J, WANG K Y, XU H B, et al. Development of an optical-fiber displacement interferometer and its application in Hopkinson pressure bar experiment [J]. Infrared and Laser Engineering, 2013, 42(1): 102–107. doi: 10.3969/j.issn.1007-2276.2013.01.019 [9] MERCIER P, BÉNIER J, FRUGIER P A, et al. Heterodyne velocimetry and detonics experiments [C]//The International Congress on High-Speed Imaging and Photonics, 2009: 712610. [10] 陶天炯, 翁继东, 王翔. 一种双源光外差测速技术 [J]. 光电工程, 2011, 38(10): 39–45. doi: 10.3969/j.issn.1003-501X.2011.10.007TAO T J, WENG J D, WANG X. A dual laser heterodyne velocimetry [J]. Opto-Electronic Engineering, 2011, 38(10): 39–45. doi: 10.3969/j.issn.1003-501X.2011.10.007 [11] 吴建荣, 李泽仁, 王德田, 等. 光纤位移干涉仪测高速漫反射面速度误差分析 [J]. 光电工程, 2008, 35(8): 35–40. doi: 10.3969/j.issn.1003-501X.2008.08.008WU J R, LI Z R, WANG D T, et al. Error analysis for the velocity measurement by fiber displacement interferometer on high speed diffuse surface [J]. Opto-Electronic Engineering, 2008, 35(8): 35–40. doi: 10.3969/j.issn.1003-501X.2008.08.008 [12] 史国凯, 杨军, 刘文祥, 等. PDV法测量内部爆炸作用下沙墙外层速度 [J]. 中国测试, 2016, 42(10): 68–71. doi: 10.11857/j.issn.1674-5124.2016.10.013SHI G K, YANG J, LIU W X, et al. Photonic Doppler velocimetry of outer layer of sand wall under internal explosion loading [J]. China Measurement & Test, 2016, 42(10): 68–71. doi: 10.11857/j.issn.1674-5124.2016.10.013 -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 8914
- HTML全文浏览量: 4180
- PDF下载量: 26
